

9.7 Устройство агрегатов системы ткс-п2
9.7.1 Индукционный датчик ид-3
Индукционный датчик служит для измерения направления горизонтальной составляющей магнитного поля Земли и, следовательно, определения магнитного курса самолета, необходимого для коррекций показаний гироагрегата курсовой системы в азимуте.
Чувствительным элементом датчика ИД-3 служат три магнитных зонда , закрепленных на основании и расположенных друг относительно друга под углом 60°.
Применение индукционного чувствительного элемента для измерения магнитного курса взамен ранее применявшегося в компасах постоянного магнита, позволяет избавиться от моментов трения, возникавших в опорах магнитной системы и в конструкции токоподводов (коллектороб со щетками) и. следовательно, позволяет намного повысить точность и стабильность показаний при малых величинах горизонтальной составляющей магнитного поля Земли (до Н=0.06 Э).
Каждый из трех магнитных зондов состоит из двух пермаллоевых сердечников марки 80НХС длиной 39 мм и диаметром 10,5 мм, заложенных в стеклянные трубки.
Каждый пермаллоевый сердечник закладывается в пластмассовый каркас, поверх которого наматываются две обмотки: намагничивающая обмотка (490 витков) и сигнальная обмотка (1960 витков).
Осевое перемещение пермаллоевых сердечников в каркасах с обмотками ограничивается тонкими стеклянными стержнями. Пермаллоевые сердечники располагаются попарно параллельно друг другу и заключаются в алюминиевом пенале, образуя магнитный зонд.
Намагничивающие обмотки трех зондов индукционного треугольника соединены последовательно навстречу друг другу и питаются переменным током напряжением 1,5 в частоты 400 гц от обмотки силового трансформатора усилителя.
Сигнальные обмотки магнитных зондов соединены звездой, фазовые напряжения этих обмоток трехпроводной связью передаются на обмотки статора сельсина-приемника коррекционного механизма
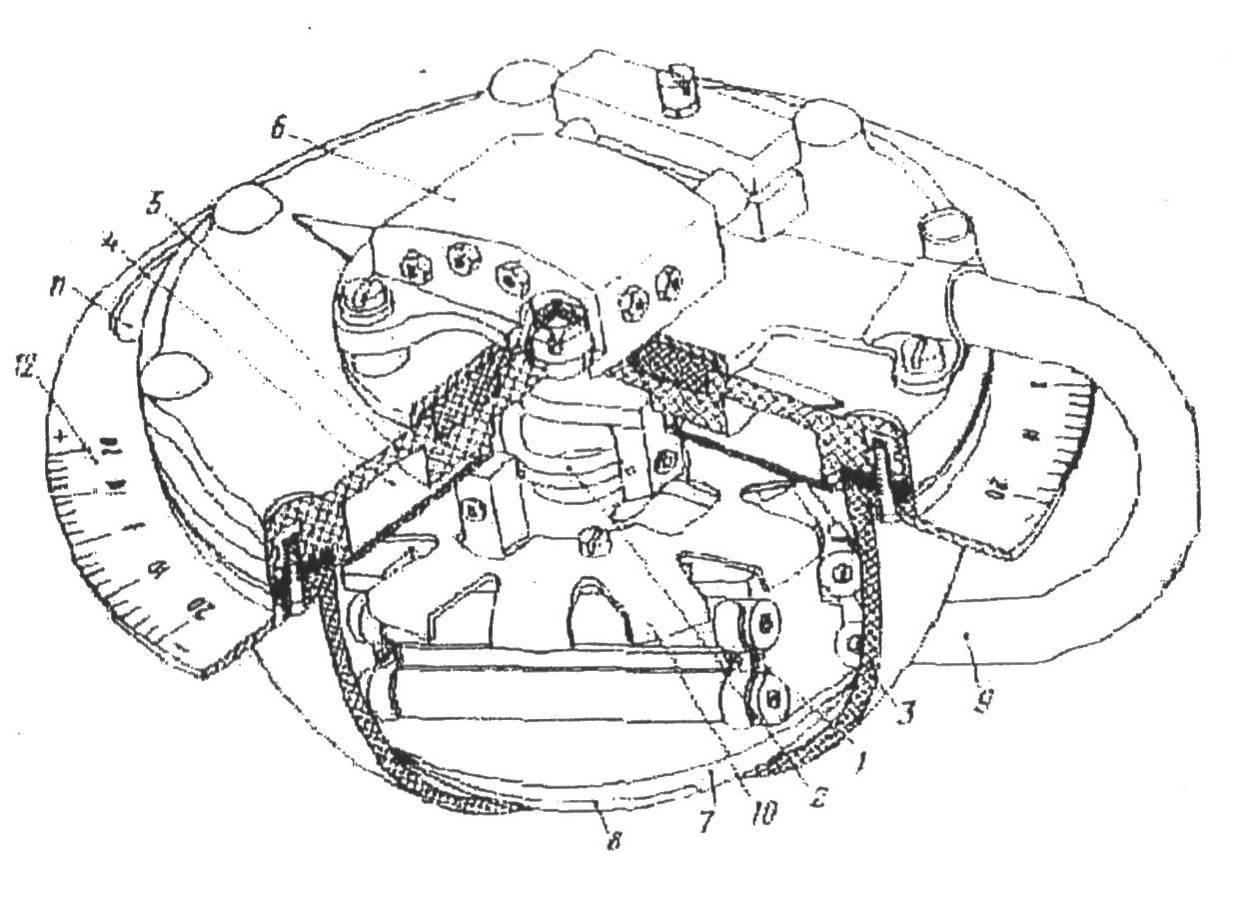
Индукционный датчик приведен на рис.9.49 ;
1 - индукционный чувствительный элемент,2 – рама карданова подвеса,. 3 - корпус,4 - компенсационная камера,5 - крышка, 6 - девиацйонный прибора, 7 – груз,8 – паз, 9 – жгут, 10 – амортизационное кольцо, 11 – овальное отверстие, 12 – шкала.
Для повышения точности измерения магнитного курса необходимо обеспечить достаточно строгое горизонтирование платформы индукционного чувствительного элемента 1, на которой расположена система, состоящая из трёх зондов. С этой целью платформа индукционного треугольника с тремя зондами подвешена в виде физического маятника на кардановой подвеске 2 и помещается в жидкость, а проводники от чувствительного элемента опускаются спиралью непосредственно к монтажной колодке датчика. Такая конструкция токоподводов более надежна в работе и резко повышает срок службы прибора.
Карданова подвеска 2 датчика позволяет сохранить горизонтальное положение чувствительного элемента при наклонах корпуса датчика в любую сторону на 15°. Ограничение отклонения чувствительного элемента осуществляется при помощи амортизационного пружинящего кольца 10. Карданова подвеска 2 крепится к крышке 5 и вместе с чувствительным элементом 1 размещается в корпусе 5 прибора. Для уменьшения трения и застоя в Осях кардановой подвески, вызываемых весом подвижной части чувствительного элемента, а также с целью демпфирования колебаний последней, корпус датчика заполняется кремнеорганйческой жидкостью ПМС-10 (полиметилсилоксан). Взвешенное состояние подвижной системы в жидкости достигается за счет подгонки груза 7, укрепленного на основании чувствительного элемента.
При помощи груза можно регулировать степень маятниковостй и, следовательно, собственную частоту колебаний подвесной части прибора. Точная ориентация чувствительного элемента в плоскости горизонта осуществляется подпаиванием балансировочных грузиков в пазы 8 груза 7. Для поддержания постоянного давления жидкости в корпусе датчика при изменении температуры окружающей среды в пределах от —60°С до +150°С в конструкции предусмотрена компенсационная камера 4, размещенная на крышке 5.
Следует отметить, что в целях компактности конструкций датчика ИД-3, пеналы с катушками в чувствительном элементе располагаются в каждом зонде по два вертикально, а не горизонтально, как это имеет место в датчике ИД-2. Каждый из трех зондов, размещенных на платформе, состоит из двух пеналов поверх которых навиты сигнальная и намагничивающая обмотки. Пеналы изготавливаются из прессматериала АГ-4. Присоединение датчика к курсовой системе на самолете производится жгутом имеющим длину 300 мм, оканчивающимся вилкой 2РМДТ24КПН10Ш5А15. Для крепления датчика к самолету в основании датчика предусмотрены три овальных отверстия 11. Они позволяют осуществить разворот датчика при устранении установочной погрешности в пределах ±20°. Отсчет при этом может быть произведен на одной из шкал 12, расположенных для удобства в трех местах основания прибора через 120°.
Устранение полукруговой девиации датчика осуществляется девиационным прибором расположенным на крышке прибора. Датчик должен крепиться к самолету при помощи специальных антимагнитных винтов и шайб, прикладываемых к датчику.
Основные технические данные датчика ИД-3:
Погрешность датчика в рабочем диапазоне температур при горизонтальной составляющей напряженности магнитного поля Земли Н=0,17Э .не более ±2°
Питание переменным током: 1.5±0.1В 400±8 Гц
Допустимый угол крена к горизонту .±15°
Эффективность девиацнонного прибора от±6° до ±12°
Вес датчика не более 0.7кг
Датчик допускает ударные перегрузки от ускорения 4g при частоте ударных импульсов от 40—80 ударов в минуту.Датчик герметичен и устойчив к воздействию пыли.
Служит для коррекции гироагрегата ГА-3 в азимуте при работе ТКС-П2 в режиме МК, а также выдает значение магнитного курса в блок БГМК-2 при работе ТКС-П2 в режиме ГПК.