

4.3. Погрешности гировертикалей
Погрешность от моментов трения в осях к а р д а и о в а п о двеса. В осях карданова подвеса неизбежно существуют моменты трения, поэтому прецессия гироскопа под действием коррекциониых моментов продолжается до тех пор, пока коррекционный момент больше момента трения. Движение гироскопа прекращается при равенстве этих моментов:
![]()
Отсюда следует, что главная ось гироскопа не дойдет до вертикального положения па углы α* и β*:
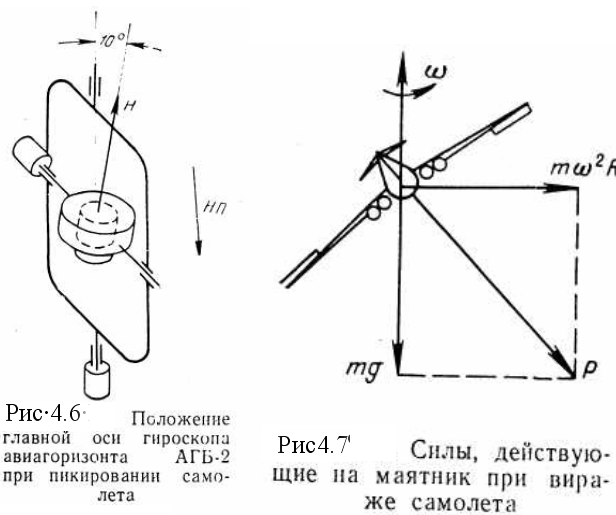
Таким образом, из-за трения в осях карданова подвеса гировертикаль имеет зону застоя, которая зависит от величины момента трения в осях карданова подвеса и, естественно, от зоны нечувствительности маятниковой коррекции (см. рис. 4.5). Чем больше удельный момент, развиваемый коррекционными двигателями, тем зона застоя меньше. Слишком большой удельный момент приводит к значительным ошибкам на вираже. Для авиагоризонтов зона застоя обычно равна 0,5—1°.
Виражная погрешность. Когда самолет совершает разворот с угловой скоростью ω, то на маятник, кроме силы тяжести mg, еще действует центробежная сила mω2R , и маятник устанавливается не по истинной вертикали, а по равнодействующей этих сил (рис. 4.7). На коррекционные двигатели поступают сигналы, и главная ось гироскопа устанавливается в положение кажущейся вертикали. Этот процесс происходит тем быстрее, чем больше удельные моменты kx, ky системы коррекции. Как видно из рис.3.10, на вираже в основном неверно работает система поперечной коррекции. Поэтому в современных гировертикалях и авиагоризонтах поперечная коррекция на виражах отключается специальным устройством.
Естественно, что и линейные ускорения самолета, например, при увеличении скорости, также приводят к аналогичным ошибкам. Поэтому в таких авиагоризонтах как АГД-1 отключается и продольная коррекция. При отключении коррекции гировертикаль работает в режиме «памяти». После окончания самолетом эволюции, связанных с ускорениями, система коррекции включается и приводит главную ось гироскопа в вертикальное положение, если за время работы в режиме «памяти» она отклонилась.
Появляется ошибка у гировертикалей и за счет суточного вращения Земли и за счет собственной скорости полета самолета, однако для транспортных самолетов эта ошибка не превышает нескольких угловых минут.
зрения появится красный флажок 12. Этот переключатель соединяет обмотки управления поперечного коррекционного двигателя 4 с фазой С, минуя сопротивление R2, и тем самым увеличивает
ток в двигателе, а следовательно, и развиваемый им коррекционный момент.
После выхода прибора на номинальный режим работы переключатель 10 следует вернуть в исходное положение (флажок исчезнет из поля зрения). В номинальном режиме работы управляющие обмотки коррекционного двигателя 4 соединены с фазой С через контакты выключателя коррекции ВК-53РБ.. При совершении самолетом разворотов выключатель коррекции отключает поперечный коррекционный двигатель, в противном случае возникает большая виражная погрешность.
4.4. Авиагоризонт аги-1с
Авиагоризонт предназначен для определения положения самолета в пространстве относительно линии истинного горизонта, имеет встроенный прибор-указатель скольжения. Устанавливают авиагоризонт на транспортных самолетах гражданской авиации.
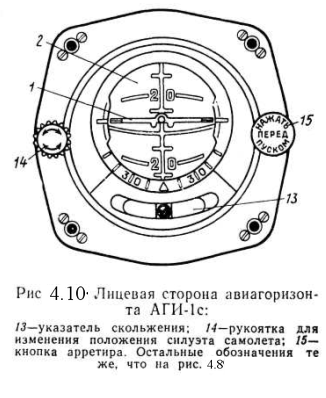
Кинематическая схема прибора изображена на рис. 4.8, упрощенная электрическая — на рис. 4.9, а вид на шкалу — на рис. 4.10.

Рассмотрим работу прибора. Собственная ось вращения гироскопа (см. рис. 4.8) по сигналам от электролитического маятника 8 с помощью коррекционных двигателей 3 и 10 устанавливается и удерживается в вертикальном положении.
Особенностью авиагоризонта АГИ-lc является способность работать в неограниченном диапазоне углов по крену и тангажу. Это возможно благодаря применению в приборе дополнительной следящей рамы 4, ось которой совпадает с продольной осью самолета, а сама рама может поворачиваться относительно самолета двигателем 11. Назначение дополнительной следящей рамы — обеспечить перпендикулярность оси собственного вращения гироскопа и оси внешней рамы карданова подвеса. При кренах самолета внешняя рама 5 карданова подвеса поворачивается вокруг оси внутренней рамы. Этот поворот фиксируется переключателем 9 (см. рис. 4.8 и 4.9), с помощью которого включается двигатель 11,поворачивающий следящую раму 4, а вмести с ней и раму 5 в противоположном направлении. Следовательно, перпендикулярность собственной оси гироскопа 6 и оси внешней рамы при этом не нарушаются. При совершении самолётом эволюций по тангажу на углы, больше 90˚, с помощью переключателя 12 изменяется направление вращения двигателя 11. Например, если самолет делает фигуру «петля Нестерова», то в момент, когда он окажется в перевернутом состоянии, т. е. изменит свое положение относительно главной оси гироскопа на 180°, направление вращения двигателя 11 для поворота следящей рамы следует изменить на противоположное.
При совершении самолетом эволюции по тангажу самолет обкатывается вокруг оси внешней рамы карданова подвеса и имеет поэтому диапазон работы 360°.
Индикация положения самолета относительно плоскости горизонта в АГИ-1с осуществляется по силуэту самолета (см. рис. 4.8 и 4.10), укрепленного на корпусе прибора, и сферической шкале 2, связанной с осью внутренней рамы 7 карданова подвеса гироскопа. Сферическая шкала 2 окрашена в коричневый цвет выше линии горизонта и в голубой — ниже линии горизонта. На коричневом поле имеется надпись «Спуск», на голубом — «Подъем». Таким образом, при наборе высоты силуэт самолета вместе с самим самолетом переместится на голубое поле, как показано на рис. 3.18, в, так как шкала 2, связанная с гироскопом, останется неподвижной в пространстве. Следует отметить, что показания авиагоризонта АГИ-lc по тангажу противоположны показаниям АГБ-2. Это чрезвычайно важно, так как оба прибора иногда устанавливают на одном самолете.

Рис 4.9 электрическая схема авиагоризонта АГИ-1.
Уменьшение времени начальной выставки оси собственного вращения гироскопа в вертикальное положение достигается последовательным включением обмоток возбуждения коррекционных двигателей 3 и 10 со статорными обмотками гиромотора. Кроме того, на внутренней раме 7 имеется механический маятник, который при невключенном приборе удерживает систему рам, примерно, в нулевом
положении. Для этой же цели служит механический арретир, при нажатии кнопки 15 которого (см. рис. 4.10) дополнительная следящая рама устанавливается в нулевое положение. На кнопке имеется надпись «Перед пуском нажать». С целью уменьшения виражной погрешности авиагоризонта поперечный коррекционный двигатель 3 на вираже отключается выключателем коррекции ВК-53РБ. На лицевой стороне прибора, внизу, расположен указатель скольжения 13 и слева — рукоятка 14 для изменения положения силуэта самолета.