

9.5. Курсовая система ткс-п и ее летная эксплуатация.
Точная курсовая система типа ТКС-П обладает более высокой точностью измерения курса, чем системы КС-6, ГМК-1Г, ГИК-1 и др., используемые в гражданской авиации. Система ТКС-П устанавливается на самолете Ил-62, Ту-154 и др.

Рис. 9.31. Общая функциональная схема курсовой системы
ТКС-П:
ДИСС—доплеровский измеритель путевой скорости и угла сноса; АРК—автоматический радиокомпас; ЦГВ—центральная гировертикаль; НВ—навигационный вычислитель; ВК—выключатель коррекции; АК—астрокомпас; УШ-3—указатель штурмана; КУШ-1—контрольный указатель штурмана; БП-5—блок пеленгов; ГА-3—гироагрегат; КМ-5—коррекционный механизм; ИД-3—индукционный датчик; ЗК 4—задатчик курса; ПУ-11—пульт управления
Курсовая система ТКС-П представляет собой совокупность магнитного, гироскопического, радиотехнического и астрономического измерителей курса самолета.
Для обеспечения работы ТКС-П необходимо иметь на борту самолета:
гировертикаль (ЦГВ-10, ТВГ, АГД-1), выдающую в курсовую систему отклонение самолета по крену,
доплеровский измеритель путевой скорости и угла сноса (ДИСС), снабжающий систему значением угла сноса (УС);
автоматический радиокомпас (АРК), определяющий курсовые углы радиостанций;
выключатель коррекции (ВК-53РШ), производящий определенные переключения в системе на развороте самолета;
дистанционный астрокомпас (ДАК-ДБ-5В) или звездно-солнечный ориентатор (ЗСО), измеряющий истинный или ортодромический курс.
Если на самолете установлен навигационный вычислитель НВ,. то в курсовую систему от него поступают заданный путевой угол ЗПУ и сигнал, пропорциональный ω3sinφ, где φ — текущая географическая широта пролетаемого места.
Из функциональной схемы ТКС-П (рис. 9.31) видно, что она сложнее схемы КС-6 как по количеству элементов, используемых: в системе, так и по функциональным связям.
Назначение курсовой системы ТКС-П:
— определение и индикация ортодромического, истинного и гиромагнитного курсов;
— выдача сигнала курса потребителям;
индикация пеленга радиостанций при совместной работе с АРК;
индикация заданного путевого угла (ЗПУ) при совместной работе с навигационным вычислителем;
индикация угла сноса и текущего путевого угла (ПУ) при совместной работе с ДИСС.
Курсовая система ТКС-П может работать в одном из следующих режимов: гирополукомпаса (ГПК), магнитной коррекции (МК), астрокоррекции (АК), курсозадатчика (ЗК).
Принцип работы ТКС-П такой же, как и КС-6, т. е. при измерении курса используется комплексирование компасов, основанных на различных физических принципах с целью максимального извлечения их преимуществ и взаимной компенсации погрешности измерителей.
В ТКС-П применены некоторые схемные и конструктивные решения, позволяющие существенно повысить точность работы системы в целом, а особенно в режиме ГПК.
9.5.1. Повышение точности работы системы ткс-п в режиме гпк
Как известно, точность работы курсового гироскопа существенно зависит от его собственных уходов в азимуте. Собственный уход гироскопа в азимуте (вокруг внешней оси карданова подвеса определяется моментами, действующими по внутренней оси карданова подвеса. Наибольшую часть моментов, действующих на гироскоп, составляют моменты трения в осях карданова подвеса, поэтому их уменьшение, естественно, повышает точность работы гироскопа.
Моменты трения по внутренним осям карданова подвеса в гироагрегатах ГА-3 курсовой системы ТКС-П уменьшаются с помощью специальных «вращающихся» подшипников. Принцип работы такого подшипникового узла рассмотрен в разд..
Чтобы гироскоп с тремя степенями свободы и горизонтальным кинетическим моментом мог измерять на самолете ортодромический курс, необходимо компенсировать скорость его ухода, зависящую от суточного вращения Земли. С этой целью в ГПК-52 и KC-6 гироскоп заставляют прецессировать со скоростью, равной ω3sinφ, причем широта места, над которым пролетает самолет, вводится вручную с пультов управления этих устройств. Однако из-за неточного знания широты места и грубых шкал широтных потенциометров географическая широта вводится с ошибкой, что, естественно, приводит к погрешностям приборов.
На рис. 9.32 приведен график, показывающий, какую дополнительную ошибку имела бы курсовая система в измерении ортодромического курса при работе в режиме ГПК, если бы широта места вводилась неточно.
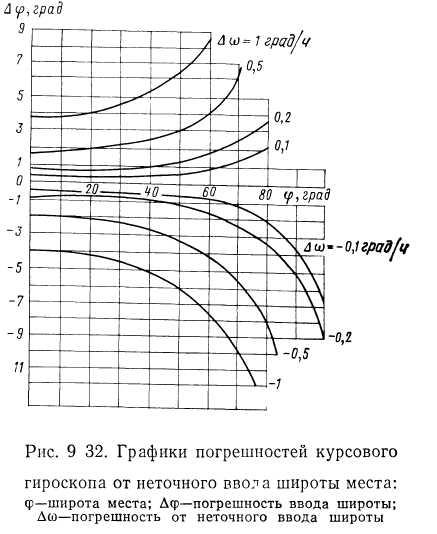
Рис. 9.32. Графики погрешностей курсового гироскопа от неточного ввода широты места:
φ – широта места; ∆φ – погрешность ввода широты; ∆ω – погрешность от неточного ввода широты
Расчеты показывают, что для того чтобы дополнительная погрешность была не более 0,1 град/ч при современных скоростях полета, необходимо широту места вводить с точностью до 0,3°, т. е. через каждые 44-5 мин полета, что может быть осуществлено только автоматически. Поэтому в курсовой системе ТКС-П предусмотрен режим работы, при котором величина ω3sinφ вводится в систему от навигационного вычислителя.
Кроме того, с целью повышения точности введения коррекции на компенсацию суточного вращения Земли в системе используется не прецессия гироскопа, вызываемая коррекционным двигателем, расположенным на внутренней оси карданова подвеса, как в КТ-6, а специальная схема широтной коррекции, представляющая собой интегрирующий привод.
Как известно, скорость прецессии гироскопа под действием прикладываемого момента равна
ω=М/Н, (9.12)
где М — прикладываемый момент; Н — кинетический момент.
Следовательно, при изменении величины кинетического момента, например, из-за различной скорости вращения ротора, обусловленной колебаниями частоты трехфазного тока 36В, изменяется скорость прецессии гироскопа, что приводит к ошибке в компенсации суточного вращения Земли.
При безмоментной широтной коррекции изменение кинетического момента не влияет на точность осуществления коррекции.
Схема формирования величины ω3sinφ интегрирующим приводом представлена на рис. 9.33.

Рис. 9.33. Электромеханическая схема широтной коррекции:
П1 – широтный потенциометр; П2 – потенциометр небаланса; СН – источник стабилизированного напряжения постоянного тока; ДГ – двигатель-генератор; ОУ – обмотка управления двигателя-генератора; ОВ – обмотка возбуждения двигателя; ТГ - тахогенератор
Значение широты места при ручном вводе широты задается на пульте управления курсовой системой с помощью рукоятки φ, отсчет установленной широты производится по шкале «Широта φ» (рис. 9.34). Если курсовая система работает с навигационным числителем, то тумблер «Авт. Ручн.» ставится в положение «Авт.» и величина ω3sinφ поступает из навигационного вычислителя.

Рис. 9.34. Лицевая сторона пульта управления ПУ-11
При ручном вводе широты с движка потенциометра П1 снимается напряжение U1 = k1 ω3sinφ, а с потенциометра П2 — напряжение U2 = k2 ∆иб, где k1 и k2 — коэффициенты пропорциональности. Напряжение U2 пропорционально постоянной составляющей собственного ухода гироскопа. Величина ∆иб устанавливается поворотом двух подстроечных потенциометров своего для каждого гироагрегата.
Таким образом, на вход усилителя УШК поступает сумма напряжений U1 и U2:
U3 = U1 + U2 = k1 ω3sinφ + k2 ∆иб. (9.13)
Напряжение U3 через усилитель УШК попадает на управляющую обмотку двигателя-генератора, который и приводит во вращение ротор тахогенератора. Напряжение, снимаемое с тахогенератора, как известно, зависит от скорости вращения его ротора. Следовательно,
![]() (9.14)
(9.14)
где α – угол поворота ротора; kТГ – коэффициент пропорциональности.
Напряжение тахогенератора включено встречно напряжению снимаемому с потенциометров П1 и П2, поэтому скорость вращения двигателя будет постоянной при условии
![]() (9.15)
(9.15)
Другими словами, двигатель вращается со скоростью, пропорциональной подводимому напряжению, а угол поворота его вала равен
![]() (9.16)
(9.16)
Так как двигатель-генератор связан со статором сельсина Mi ротор которого жестко закреплен на оси внешней рамы карданова подвеса гироскопа, то разворот статора сельсина относительно гироскопа будет происходить со скоростью
![]()
Таким образом, в ТКС-П вводится широтная коррекция Точность работы этой системы целиком зависит, при достаточном коэффициенте усиления усилителя, от линейности и стабильности характеристики тахогенератора. Характеристики тахогенератора не зависят от напряжения питания, так как магнитное поле тахогенератора создается постоянным магнитом. Питающее же напряжение потенциометров стабилизировано.
Следует заметить, что при среднем положении движка потенциометра П1 напряжение, снимаемое с него, равно нулю и соответствует нулевой географической широте. Следовательно, переключатель «Север — Юг» не нужен.
Горизонтальная коррекция гироагрегатов ТКС-П отличается от коррекции ГИК-1 и КС-6. Вместо электролитического жидкостного маятника используется емкостный дифференциальный маятниковый датчик, включенный в схему моста (рис. 9.35). Статорные пластины датчика подвешены в виде маятников на внешней раме карданова подвеса и соединены с обмотками трансформатора. Роторная обмотка датчика соединена механически с осью внутренне рамы карданова подвеса и электрически — со входом усилителя горизонтальной коррекции ГКУ.
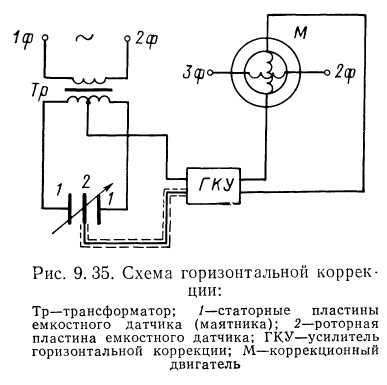
Рис. 9.35. Схема горизонтальной коррекции:
Тр – трансформатор; 1 – статорные пластины емкостного датчика (маятника); 2 – роторная пластина емкостного датчика; ГКУ – усилитель горизонтальной коррекции; М – коррекционный двигатель
Образующийся электрический мост сбалансирован, если собственная ось вращения гироскопа лежит в горизонтальной плоскости. Если собственная ось гироскопа в силу каких-либо причин отклоняется от плоскости горизонта, то взаимное расположение статорных пластин конденсатора изменяется, так как они являются маятниками. При этом изменяется сопротивление плеч моста, и на вход усилителя ГКУ поступает сигнал. Усиленный сигнал поступает на обмотку управления коррекционного двигателя, жестко связанного с осью внешней рамы карданова подвеса. Гироскоп под действием момента двигателя прецессируя восстанавливает горизонтальное положение своей оси и балансирует мост. Такая система коррекции работает надежнее и точнее благодаря высокой чувствительности усилителя ГКУ.