

1.5. Методы измерения скорости полета
Скорость полета самолета измеряют относительно воздушного потока и относительно поверхности земли. Причем рассматривают как горизонтальную, так и вертикальную составляющие скорости. Различают истинную воздушную скорость — скорость полета самолета относительно воздушного потока, индикаторную (приборную) скорость — скорость полета самолета относительно воздушного потока у земли при таком же динамическом давлении (скоростном напоре) как на данной высоте, и путевую скорость — скорость полета самолета относительно поверхности земли. Путевая скорость равна геометрической сумме горизонтальных составляющих истинной воздушной скорости и скорости ветра.
Безразмерной характеристикой скорости полета самолета является число М, равное отношению истинной воздушной скорости к скорости звука.
Приборы, предназначенные для измерения индикаторной скорости, называются указателями индикаторной скорости, а приборы, определяющие истинную воздушную скорость, — указателями истинной воздушной скорости. Часто применяются комбинированные указатели скорости (КУС), сочетающие в себе оба выше названных. Приборы, предназначенные для измерения числа М, называются М-метрами или указателями числа М.
Известно несколько методов измерения скорости полета самолета. Среди них следует отметить аэродинамический, доплеровский и инерциальный.
![]()
![]()
![]()
Доплеровский метод измерения скорости полета сводится к измерению разности частот радиосигналов — излучаемого к земной поверхности и отраженного от нее.
Инерциальный метод измерения скорости основан на измерении ускорений и однократном интегрировании полученных сигналов.
Доплеровский и инерциальный методы применяются для измерения путевой скорости.
Здесь будут рассмотрены приборы, основанные на аэродинамическом методе измерения скорости.
1.6. Теория аэродинамического метода измерения скорости полёта.
Применим уравнение Бернулли к струйке воздушного потока, действующего на открытую часть приемника воздушных давлений:
 (1.1)
(1.1)
где g — ускорение силы тяжести р, γ1, V1 и рп, γ2,V2 —соответственно давление, весовая плотность и скорость набегающего и заторможенного потоков.
При полном торможении потока (V2 = 0) выражение (1.1) принимает вид
 (1.2)
(1.2)
При малых скоростях полета (V<400 км/ч) воздух можно считать несжимаемым. Полагая γ1 = γ2 = γ и V1=V, получим
![]() (1.3)
(1.3)
Величина называется динамическим давлением или скоростным напором, а давление рп — полным. Оно равно сумме давлений: р — в набегающем потоке и Δр — скоростного напора.
Из выражения (1.3) следует, что для измерения скорости полета V необходимо определить разность давлений Δр = рп — р и извлечь квадратный корень из этой величины. На рис. 1. 11 представлена принципиальная схема указателя скорости. Разность давлений измеряют следующим образом. В герметичный корпус 4 прибора подается статическое давление р от приемника воздушных давлений 1 по трубопроводу 2, а внутрь манометрической коробки 5—полное давление рП от ПВД по трубопроводу 3.
Манометрическая
коробка
деформируется в соответствии
с разностью давлений
![]() р
= рп—р,
а
извлечение корня
из этой величины для получения
скорости V
осуществляется
в передаточном механизме.
Стрелка 6
показывает
по шкале 7
измеряемую
скорость полета.
р
= рп—р,
а
извлечение корня
из этой величины для получения
скорости V
осуществляется
в передаточном механизме.
Стрелка 6
показывает
по шкале 7
измеряемую
скорость полета.
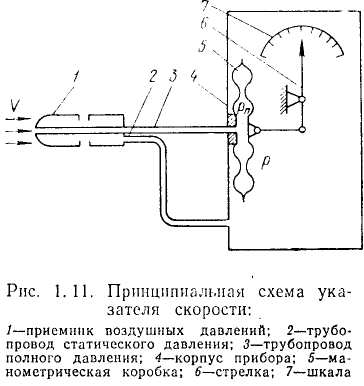
Рис.1.9 принципиальная схема указателя скорости.
1-приёмник воздушного давления, 2-трубопровод статического давления, 3-трубопровод полного давления, 4-корпус прибора, 5-манометрическая коробка, 6-стрелка, 7-шкала.

Рис. 1.10. Структурная схема указателя приборной скорости: 1 – приемник давлений РпиРст; 2 – пневмопроводРп; 3 – пневмопроводРст; 4 – отстойники-фильтры каналаРп; 5 – отстойники-фильтры каналаРст; 6 – полость коробки; 7 – полость корпуса; 8 – условное звено образования динамического давленияРд; 9 – решающее устройство; 10 – индикатор
Для скоростей более 400 км/ч, но не превышающих скорость звука, необходимо пользоваться формулой с учетом сжимаемости воздуха. Процесс сжатия воздуха в приемнике можно считать близким к адиабатическому (происходящим без отдачи и приема энергии),так как время соприкосновения частиц воздуха с ПВД ничтожно мало. Тогда уравнение Бернулли может быть написано в виде
 (1.4)
(1.4)
где k — коэффициент адиабатического сжатия воздуха. Он представляет собой отношение теплоемкости воздуха Ср при постоянном давлении к теплоемкости воздуха СV при постоянном объеме,
 т.
е.
т.
е.
Положив снова V2=0 и V1 = V, из уравнения (1.4) имеем
![]() (1.5)
(1.5)