

2.3.Системы свс с вычислительными устройствами, совмещенными с указателями
В системах СВС с вычислительными устройствами, совмещенными с указателями, решаются те же зависимости, что и в системах типа СВС—ПН.
В основу вычислительных устройств здесь положены мостовые схемы. Для определения числа М используется потенциометрическая схема деления, для нахождения температуры Т наружного воздуха и скорости V — реостатные мостовые схемы умножения, для вычисления высоты Нотн — потенциометрическая схема вычитания. Во всех этих схемах на вход усилителя следящей системы поступает сигнал рассогласования с задающих и отрабатывающих потенциометров, который после усиления приводит во вращение ротор двигателя. Двигатель через редуктор перемещает щетки потенциометра отработки и выходных потенциометров (подвижные элементы синусно-косинусных трансформаторов), а также стрелку визуального отсчета. Двигатель реверсируется за счет изменения фазы сигнала рассогласования.
Блок датчиков давлений БД. Он состоит из датчиков статического р и динамического давлений рдин, элементов встроенного контроля и трансформаторов, обеспечивающих электрическое питание. Относительные сопротивления, пропорциональные выходным параметрам р, Н, рдин, VИ, выдаются функциональными потенциометрами блока, щетки которых соединены с двигателями следящих систем.
По кинематической схеме и принципу действия датчик статического давления р аналогичен корректору КЗВ в режиме «обнуления» Датчик динамического давления рдин отличается от датчика статического давления р лишь УЧЭ (манометрическая коробка) и выходными фукциональными потенциометрами.
Указатель Нотн (рис. 2.11). Данный указатель построен по типовой потенциометрической мостовой схеме вычитания, решающей зависимость Нотн = Н - Нзад. Входными величинами являются: высота Н в виде перемещения y (Н) щетки потенциометра В2 (входит в состав блока БД); высота Нзад в виде перемещения х щетки потенциометра В1 в результате поворота ручки ввода Нзад. Значение Нзад отражается на счетчике Сч. Автоматическое действие моста достигается за счет следящей системы, состоящей из усилителя У, двигателя М и редуктора Р`. При изменении переменной у или х равновесие моста нарушается и на вход усилителя поступает сигнал рассогласования. Двигатель М, перемещая щетку потенциометра В3, восстанавливает равновесие моста. Условием равновесия моста является равенство
![]()
При U1 = U2 последнее равенство принимает вид RНотн = Rн - RНзад.
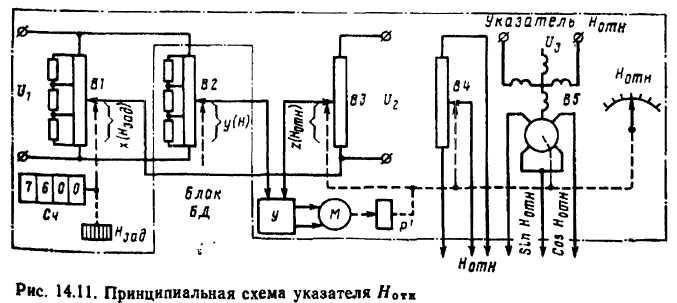
Рис. 2.11. Принципиальная схема указателя Нотн
Двигатель М поворачивает также щетки выходных потенциометров В4, подвижные элементы синусно-косинусных трансформаторов В5 и стрелку указателя Нотн (на схеме выходные преобразователи В4 и В5 показаны по одному).
Комбинированный указатель числа М и скорости V (УМС) (рис. 14.12).
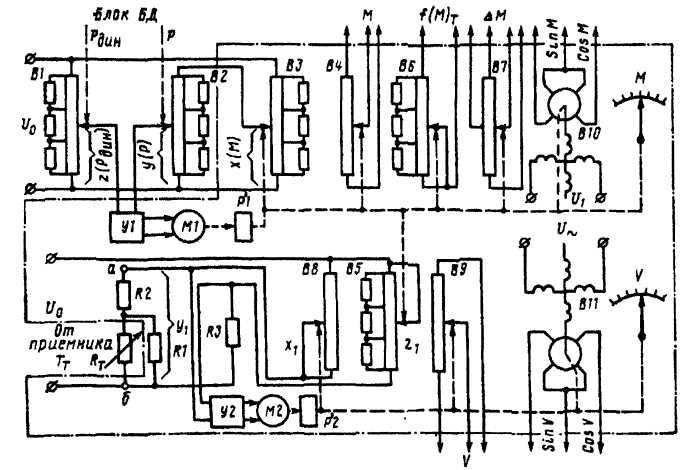
Рис. 2.12. Принципиальная схема комбинированного указателя числа М и скорости V
Он состоит из двух самостоятельных каналов решения:
числа
М
(∆М)
и скорости V.
В указатель входят: усилители У1
(канал
числа М), У2
(канал
скорости V);
двигатели М1,
M2;
функциональный
потенциометр ВЗ
отработки
числа М; выходные потенциометры
В4
канала
числа М
(на схеме изображен один); функциональный
реостат
В5,
выдающий
сигнал пропорционально функции f(M)v
функциональный
реостат В6,
реализующий
функцию
![]() ;
выходной потенциометр В7,
выдающий
отклонение
ДМ; синусно-косинусные трансформаторы
В10,
В11;
реостат
В8
отработки
канала скорости V;
выходные
потенциометры В9;
резисторы
R1,
R2,
R3
канала
скорости V;
редукторы Р`1,
Р'2.
;
выходной потенциометр В7,
выдающий
отклонение
ДМ; синусно-косинусные трансформаторы
В10,
В11;
реостат
В8
отработки
канала скорости V;
выходные
потенциометры В9;
резисторы
R1,
R2,
R3
канала
скорости V;
редукторы Р`1,
Р'2.
Число М вычисляется потенциометрическим мостом деления. Входные величины — давления р и рдин поступают в виде относительных сопротивлений потенциометров В2 и B1блока БД.
Условием равновесия моста является равенство Uz = Uy. Напряжения
где RВ1 и RВ2 — полные сопротивления потенциометров В1 и В2; Ry и Rz — сопротивления, пропорциональные перемещениям у и z, Ux — напряжение питания потенциометра В2, являющееся выходным напряжением потенциометра ВЗ; пропорциональным числу M.
Если
пренебречь шунтирующим влиянием
сопротивления RВ2
и
приравнять Uz
и
Uy,
то
можно получить
![]() ,
где
,
где ![]() ,
,
![]() ,
,
![]() — относительные
сопротивления.
— относительные
сопротивления.
На одной оси со щеткой потенциометра ВЗ находятся также щетки выходных потенциометров и реостатов В4…В7, подвижной элемент синусно-косинусного трансформатора BJO и стрелка визуального отсчета числа М.
Истинная
воздушная скорость V
вычисляется
с помощью реостатной
мостовой схемы по формуле (2.3). Входные
параметры: f
(M)v,
определяемая
по формуле (2.4), вводится в виде выходного
сопротивления
реостата В5;
![]() вводится
цепочкой из резистора RT,
приемника
температуры ТТ
и
резисторов R1,
R2.
вводится
цепочкой из резистора RT,
приемника
температуры ТТ
и
резисторов R1,
R2.
Для равновесного положения моста (реостаты B5, B8, резистор R3, сопротивление Rаб между точками а и б, справедливо равенство
![]()
где RХ1 — сопротивление реостата В8; RZ2 — сопротивление реостата В5.
Поскольку
R3
=
const
= К,
то
RХ1
= Ry1
*Rz1
/ K
. Последнее выражение
соответствует расчетной формуле (14.3),
так как сопротивление
Ry1
пропорционально
![]() ,
а
сопротивление
,
а
сопротивление![]() .
.
На одной оси с щеткой реостата В8 отработки скорости V находятся также щетки выходных потенциометров В9 (на схеме показан один), подвижный элемент синусно-косинусного трансформатора ВЦ и стрелка визуального отсчета скорости V. Для проведения встроенного контроля вместо сопротивления RT можно подключать эталонное сопротивление (на схеме не показано).
Указатель температуры Т наружного воздуха. Реостатная мостовая схема указателя температуры Т (рис. 2.13) аналогична схеме канала скорости V комбинированного УМС. Здесь реализуется формула (2.2) в виде
Величина
![]() вводится
так же, как и в предыдущей схеме, а
вводится
так же, как и в предыдущей схеме, а
![]() поступает в виде сопротивления
функционального реостата B2,
выходного
элемента канала числа М
комбинированного
указателя УМС. На рис. 2.12
этот реостат обозначен как В6.
поступает в виде сопротивления
функционального реостата B2,
выходного
элемента канала числа М
комбинированного
указателя УМС. На рис. 2.12
этот реостат обозначен как В6.
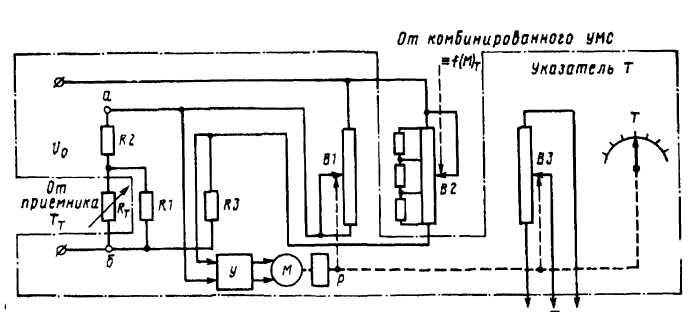
Рис. 2.13. Принципиальная схема указателя температуры Т наружного воздуха