

Комплексные измерители высотно-скоростных параметров
2.1.Общие сведения о системах воздушных сигналов
Наряду с приборами и датчиками, определяющими высотно-скоростные параметры, на самолетах применяют системы воздушных сигналов (СВС), которые называют также централями скорости и высоты. Они предназначены для комплексного измерения этих параметров и централизованного снабжения ими различных потребителей. К таким параметрам относят: число М, истинную воздушную скорость V, индикаторную скорость Vи, относительную барометрическую высоту Нотн, абсолютную барометрическую высоту Н, температуру наружного воздуха Т, отклонения ∆М, ∆Н,∆V числа M, высоты Н, скорости VИ от заданных значений.
На рис. 2.1 приведена схема использования СВС в канале руля высоты в системе автоматического управления САУ-1Т. В режиме стабилизации угла тангажа υ в сервопривод руля высоты СПРВ одновременно с сигналами Uυ и Uωz пропорциональными отклонению угла тангажа и угловой скорости ωz относительно поперечной оси самолета, подается сигнал UV, пропорциональный скорости VИ. Сигнал Uv при возрастании скорости выше допустимой поступает на вход привода СПРВ через диодную цепь зоны нечувствительности и усилитель. Привод отклоняет руль высоты на кабрирование ВС, и скорость его уменьшается,
В режимах стабилизации числа М, скорости VИ или высоты полета на вход привода СПРВ поступают соответственно сигналы U∆М, U∆Н, U∆V, пропорциональные отклонениям этих параметров от заданных значений. Сигнал U∆М выдается электрическим блоком коррекции числа М БКМЭ, сигналы U∆Н и U∆V — корректорами-задатчиками скорости приборной (КЗСП) и корректора-задатчика высоты (КЗВ) соответственно.
Структурные схемы возможных аналоговых систем воздушных сигналов приведены на рис. 2.2. Отличительной особенностью систем СВС является то, что автоматическое решение расчетных зависимостей производится в отдельном от указателей вычислителе. Последний выдает бортовым потребителям и указателям электрические сигналы, пропорциональные определяемым параметрам. В системах СВС, построенных по структурной схеме (рис. 2.2, в), решение расчетных зависимостей производится в вычислителях, совмещенных конструктивно с указателями. Сигналы выдаются указателями.
Вводимые в вычислители электрические сигналы, пропорциональные р и рдин, выдаются блоками датчиков давлений БД, выделенными отдельно или совмещенными с вычислителем, а электрический сигнал, пропорциональный температуре Т выдается приемником температуры ТТ. При необходимости в вычислители могут вводится вручную значения давления р0 и температуры То у поверхности Земли, давления рз заданного уровня.
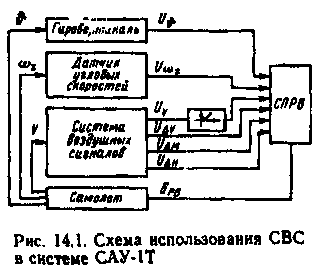
Рис. 2.1. Схема использования СВС в системе САУ-1Т
Потенциометрический блок преобразования напряжения БПнП (рис. 2.2, б) предназначен для преобразования сигналов напряжений в сигналы в виде относительных сопротивлений. Схеме, приведенной на рис. 2.2, а, соответствует система воздушных сигналов, применяемая под названием централи скорости и высоты типа ЦСВ, Схеме, приведенной на рис. 2.2, б, соответствует система воздушных сигналов типа СВС —ПН, а схеме, показанной на рис. 2.2, в, — система воздушных сигналов типа СВС.

Рис. 2.2. Структурные схемы возможных аналоговых систем воздушных сигналов
Системы СВС, построенные по схемам, изображенным на рис, 2.2, а и в, формируют сигналы давлений р и рдин в линейном масштабе, т. е. УЧЭ имеют линейные характеристики по измеряемым давлениям. Все операции, связанные с решением расчетных зависимостей, производятся на самобалансирующихся мостовых схемах, в состав которых входят линейные и функциональные потенциометры вместе с элементами следящих систем отработки.
Системы СВС, построенные по схеме, показанной на рис. 2,2, б1, формируют сигналы давлений в логарифмическом масштабе, т. е. УЧЭ имеют характеристики по измеряемым давлениям, меняющиеся по логарифмическому закону. Это позволяет более просто вести функциональные преобразования в системе. В таких системах СВС применяется бесконтактный аналоговый вычислитель, основанный на использовании диодных функциональных преобразователей напряжения. Самобалансирующиеся потенциометрические мосты применяются лишь в указателях и блоках БПнП.