

Измерение углов крена и тангажа, измерение скольжения
4.1 Построение вертикали с помощью физического маятника на самолете
При пилотировании самолета необходимо знать его положение относительно плоскости земного горизонта. Положение самолета относительно плоскости горизонта определяется двумя углами: углом тангажа и углом крена. Угол тангажа — угол между продольной осью самолета и плоскостью горизонта, отсчитываемый в вертикальной плоскости. Угол крена — угол поворота самолета вокруг его продольной оси, отсчитываемый от вертикальной плоскости, проходящей через продольную ось самолета
 .
.
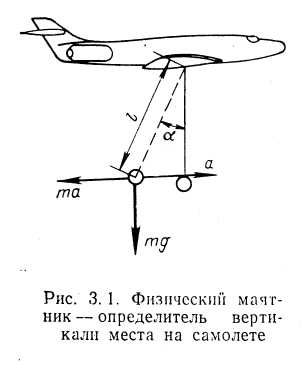
Рис 4.1 фзический маятник – определитель вертикали на самолёте.
Таким образом, положение самолета относительно плоскости горизонта можно определить, если на самолете знать направление истинной вертикали, т. е. направление линии, проходящей через центр Земли и самолет, и замерять отклонение самолета от этого направления.
Отклонение от вертикали на земле определяют обычным отвесом, т. е. физическим маятником.
Предположим, что физический маятник установлен на самолете, который совершает горизонтальный полет с ускорением а (рис. 4.1). На массу маятника т будут действовать силы от ускорения силы тяжести g и инерционная сила от ускорения а. Сумма моментов от этих сил относительно точки подвеса маятника равна нулю и выражается уравнением
![]() (4.1)
(4.1)
где l — длина маятника;
α — угол отклонения маятника
Из уравнения (4.1) имеем
![]() (4.2)
(4.2)![]()
Следовательно, маятник, установленный на объекте, движущемся с ускорением, отклоняется в сторону, противоположную действию ускорения, и показывает так называемую «кажущуюся вертикаль». Современные транспортные самолеты могут иметь ускорения, соизмеримые по величине с ускорением силы тяжести, поэтому угол α отклонения маятника от вертикали может достигать значительных величин. Таким образом, физический маятник не пригоден для определения направления вертикали места, т. е. для измерения углов крена и тангажа, если самолет совершает полет с ускорением.
4.2 Авиагоризонты
Ранее было отмечено, что маятник может быть использован для определения вертикали только при полете без ускорений, а свободный трехстепенный гироскоп может выдерживать заданное пространственное положение вне зависимости от действующих ускорений только небольшое время.
Поэтому эти два устройства соединяют вместе, используя положительные свойства каждого. При отсутствии ускорений с помощью маятника главная ось гироскопа выставляется вертикально. В те моменты, когда на маятник действуют ускорения, его отключают и гироскоп работает в режиме «памяти».
Устройство, с помощью которого маятник действует на гироскоп, называется системой маятниковой коррекции. Гироскоп с такой коррекцией называют гировертикалью. Гировертикаль, визуально показывающая положение самолета относительно земного горизонта, называется авиагоризонтом.
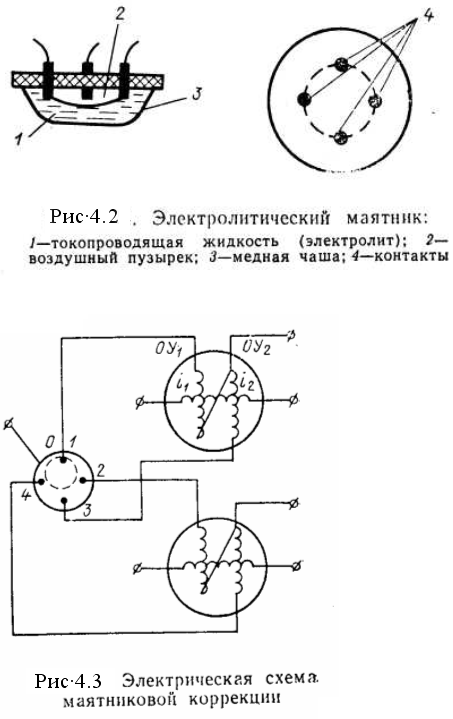
В авиагоризонтах используется электролитический маятник (рис. 4.2), представляющий собой плоскую медную чашу 3, заполненную токопроводящей жидкостью 1 с большим удельным электрическим сопротивлением. Жидкости в чаше столько, что остается место для воздушного пузырька 2. Чаша закрыта крышкой из изоляционного материала, в которую вмонтировано четыре контакта 4, пятым контактом является сама чаша. Если маятник расположен горизонтально, то все четыре контакта равномерно перекрываются жидкостью и электрическое сопротивление участков между ними и чашей одинаково. Если же чаша наклонится, то пузырек воздуха, занимая верхнее положение в чаше, оголит один из контактов и тем самым изменит электрическое сопротивление участка, которое при малых углах (до 30') пропорционально углу наклона чаши.
 Контакты
маятника включаются в электрическую
цепь, как показано на рис. 4.3. При
наклоне маятника сопротивление между
контактами 0 и 1 будет больше, чем
сопротивление между контактами
0 и 3. Тогда ток i1
который
проходит по управляющей обмотке
OY1,
будет меньше тока
i2
обмотки
OY2
коррекционного двигателя. Обмотки
OY1
и OY2
намотаны встречно, поэтому разностный
ток
Δi=i2—i1
создает
магнитный поток, который, взаимодействуя
с
магнитным потоком обмотки возбуждения,
вызывает вращающий момент.
Ротор двигателя закреплен на оси
карданова подвеса, следовательно,
к оси подвеса приложен момент, под
действием которого
гироскоп прецессирует. Прецессия
гироскопа продолжается до
тех пор, пока существует момент по оси
карданова подвеса, а
этот момент действует до установки
маятника в горизонтальное положение,
при котором ток i1=i2.
Связав маятник с внутренней,
рамой
карданова подвеса и расположив по осям
подвеса коррекционные
двигатели, получаем гировертикаль с
электромеханической
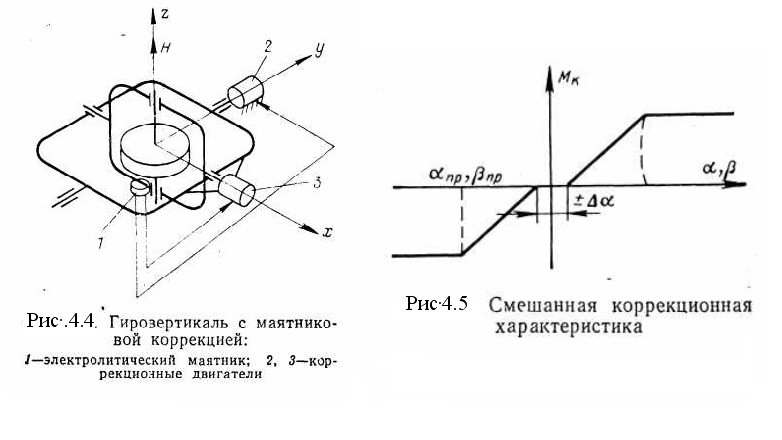
маятниковой коррекцией (рис. 4.4). Таким
образом, электролитический маятник 1,
действуя на гироскоп
через коррекционные двигатели 2
и
3,
все время будет приводить
главную ось гироскопа к положению
вертикали. При отключении
коррекции гироскоп будет сохранять
свое прежнее положение
в пространстве с точностью, определяемой
его собственными ошибками,
например, за счет прецессии,
вызванной моментами трения
по осям карданова подвеса.
Контакты
маятника включаются в электрическую
цепь, как показано на рис. 4.3. При
наклоне маятника сопротивление между
контактами 0 и 1 будет больше, чем
сопротивление между контактами
0 и 3. Тогда ток i1
который
проходит по управляющей обмотке
OY1,
будет меньше тока
i2
обмотки
OY2
коррекционного двигателя. Обмотки
OY1
и OY2
намотаны встречно, поэтому разностный
ток
Δi=i2—i1
создает
магнитный поток, который, взаимодействуя
с
магнитным потоком обмотки возбуждения,
вызывает вращающий момент.
Ротор двигателя закреплен на оси
карданова подвеса, следовательно,
к оси подвеса приложен момент, под
действием которого
гироскоп прецессирует. Прецессия
гироскопа продолжается до
тех пор, пока существует момент по оси
карданова подвеса, а
этот момент действует до установки
маятника в горизонтальное положение,
при котором ток i1=i2.
Связав маятник с внутренней,
рамой
карданова подвеса и расположив по осям
подвеса коррекционные
двигатели, получаем гировертикаль с
электромеханической
маятниковой коррекцией (рис. 4.4). Таким
образом, электролитический маятник 1,
действуя на гироскоп
через коррекционные двигатели 2
и
3,
все время будет приводить
главную ось гироскопа к положению
вертикали. При отключении
коррекции гироскоп будет сохранять
свое прежнее положение
в пространстве с точностью, определяемой
его собственными ошибками,
например, за счет прецессии,
вызванной моментами трения
по осям карданова подвеса.
Коррекционные системы различаются по типам характеристик. Коррекционной характеристикой называется закон изменения момента, развиваемого коррекционным двигателем, в зависимости от отклонения главной оси гироскопа от положения вертикали.
В авиационных приборах наибольшее распространение получила смешанная коррекционная характеристика (рис. 4.5). Область ±Δα определяет зону нечувствительности системы. До некоторых предельных значений углов αпр,
βпр момент коррекции Мк меняется пропорционально углам α и β, а затем становится постоянным.