

9.6 Точная курсовая системы ткс-п2и её компоненты
9.6.1 Назначение
Точная курсовая система ТКС-П2 предназначена для определения магнитного и ортодромического курсов самолета. При совместной работе с автоматическим радиокомпасом курсовая система позволяет определять пеленги радиостанции и самолета.
Значение курса индицируется на коррекциониых механизмах КМ-5 и указателе штурмана УШ-3 из комплекта ТКС-П2, на приборах ПНП-1 из комплекта системы АБСУ-154-2 и индикаторах курсовых углов ИКУ-1А из комплекта аппаратуры «Курс МП-2».
Сигналы курса от ТКС-П2 выдаются в навигационное вычислительное устройство НВУ-БЗ для счисления координат самолета, в систему траекторного управления СТУ-154-2 для формирования команд на управление самолетом по крену, в систему автоматического управления САУ-154-2 для стабилизации курса самолета и в аппаратуру «Курс МП-2» для формирования сигналов азимута радиомаяков VOR. Функциональная схема ТКСП-2 приведена на Рис.9.47.
Курсовая система является комплексом взаимосвязанных устройств(магнитных, гироскопических, астрономических и радиотехнических) и, как основную, решает задачу выдерживания ортодромического курса самолета (работа курсовой системы в режиме ГПК). При этом начальная выставка ортодромического курса и его периодическая корректировка осуществляется либо с помощью магнитной коррекции по сигналам индукционного датчика (ИД), измеряющего направление горизонтальной составляющей вектора магнитного поля Земли, либо по сигналам астродатчика, определяющего истинный или ортодромический курс по положению небесных светил: Солнца или звезд.
9.6.2 Комплект и размещение
В состав системы входят:
-индукционные датчики ИД-3 (в левой и правой консолях крыла, 2 шт.);
-коррекционные механизмы КМ-5 (в кабине экипажа по правому борту, 2 шт.);
-гироагрегаты ГА-3 основной и контрольный (в техотсеке);
-блоки гиромагнитного курса БГМК-2 (в техотсеке, 2 шт.);
-распределительные блоки РБ-2 (в техотсеке, 2 шт.);
-указатель штурмана УШ-3 (на средней приборной доске пилотов);
-блок дистанционной коррекции БДК-1 (на приборной доске второго пилота);
-пульт управления ПУ-11 (на верхнем электрощитке пилотов).
С комплектом системы используются девять выключателей на верхнем электрощитке пилотов: ТКС «ПИТАНИЕ № 1 и № 2», «ОБОГРЕВ ГА», «КОРРЕКЦИЯ БГМК-2 № 1 и № 2». «КУРС—ПНП ЛЕВ. И ПРАВ» с положениями «ГПК—ГМК» и «СТАБИЛИЗАЦИЯ ГА ПО КРЕНУ ОСНОВ. И КОНТР—АРРЕТИРОВАНИЕ ГА».
Технические данные
Погрешность определения гиромагнитного курса . ± 1,5°
Погрешность выдачи ортодромического курса:
в районе широт ±20° от места балансировки ±0,5°
в районе широт ±90° от места балансировки ±0,8°
Рабочие углы:
по крену ±55)"
по тангажу ±40°
Питание от сети напряжением:
постоянного тока 27 В
переменного (400 Гц) тока 200/36 В
Время готовности к работе после включения питания в режиме гирополукомпаса не менее 10 мин
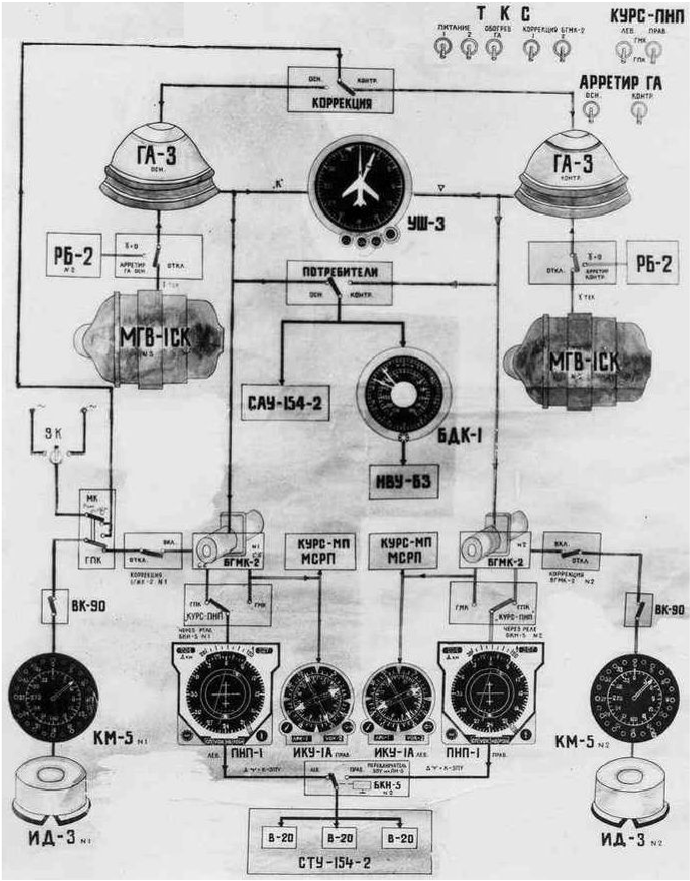
Рис 9.47. Функциональная схема курсовой системы ТКСП-2
9.6.3 Принцип действия
Основным режимом работы ТКС-П2 является режим гирополукомпаса (ГПК). При этом. оба гироагрегата ГА-3 (основной и контрольный) работают в режиме ГПК.
Режим магнитной коррекции (МК) является вспомогательным и используется кратковременно (3—4 мин) для первоначальной выставки гироагрегатов по магнитному курсу и компенсации ухода главной оси гироскопа в азимуте.
В режиме МК принцип действия основан на использовании свойств двух чувствительных элементов: индукционного датчика ИД-3 и курсового гироскопа ГА-3. Индукционный датчик с достаточной точностью определяет направление горизонтальной составляющей напряженности магнитного поля Земли. Недостатком ИД-3 является высокая чувствительность к ускорениям. которая приводит к появлению ошибок в виде колебаний сигнала курса.
Гироскоп, сохраняя положение главной оси вращения неизменным в пространстве, не реагирует на ускорения, сопровождающие полет самолета. Но главная ось гироскопа «уходит» от меридиана коррекции из-за суточного вращения Земли, из-за трения в осях и неточности балансировки. При совместной работе индукционного датчика и курсового гироскопа недостатки чувствительных элементов взаимно компенсируются.
Принцип работы ТКС-П в режиме МК основан на сочетании курсового гироскопа (рис. 9.48) и прибора, измеряющего направление горизонтальной составляющей магнитного поля Земли – чувствительного элемента. Указанное сочетание используют для получения стабильных показаний магнитного курса (называемого обычно гиромагнитным). Курсовой гироскоп в данной схеме является элементом, обеспечивающим мгновенное и устойчивое показание курса, отфильтрованного от высокочастотных помехочувствительных элементов электромеханическим пли гироскопическим фильтром. Это позволяет и реальных условиях полета обеспечить точность измерения магнитного курса, примерно соответствующую статической точности чувствительного элемента, так как медленно нарастающая погрешность гироскопа выбирается корректирующим (фильтрующим) устройством. На рисунке приняты обозначения: z – главная ось гироскопа; х и у – оси прецессии гироскопа; Н – кинетический момент гироскопа; I – момент инерции ротора гироскопа; w – угловая скорость вращения ротора гироскопа; Мx – внешний момент силы, действующий относительно оси х;ωпр – угловая скорость прецессии относительно оси у.α– величина ухода гироскопа в азимуте.Курсовая система ТКС по своей структуре является универсальным датчиком курса, входящим в комплекс навигационно-пилотажного оборудования самолета. Система ТКС в навигационно-пилотажном комплексе самолета позволяет с высокой точностью на маршруте производить счисление пути, обеспечивая значение точного курса, необходимого для раскладки вектора путевой скорости. Система также обеспечивает выдачу курса, необходимого для построения захода на посадку в районе аэродрома.
В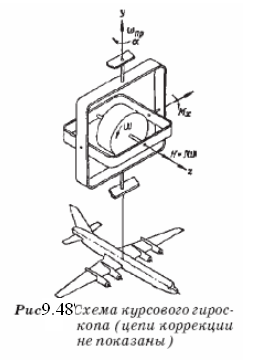 виду
того, что полет по ортодромии обладает
рядом преимуществ (точностных и
методических) по сравнению с полетом
по локсодромии, а также и в силу того,
что на больших скоростях (приМ
> 1) определение
курса с достаточной степенью точности
возможно лишь в режиме ГПК (ввиду
свойственной чувствительному элементу
индукционного датчика так называемой
скоростной девиации и определенных
ограничений при работе астрокомпасов).
Основным назначением ТКС является
определение ортодромического курса
самолета, точность которого определяется
дрейфом курсового гироскопа, ошибкой
его начальной выставки и точностью
коррекции в полете.
виду
того, что полет по ортодромии обладает
рядом преимуществ (точностных и
методических) по сравнению с полетом
по локсодромии, а также и в силу того,
что на больших скоростях (приМ
> 1) определение
курса с достаточной степенью точности
возможно лишь в режиме ГПК (ввиду
свойственной чувствительному элементу
индукционного датчика так называемой
скоростной девиации и определенных
ограничений при работе астрокомпасов).
Основным назначением ТКС является
определение ортодромического курса
самолета, точность которого определяется
дрейфом курсового гироскопа, ошибкой
его начальной выставки и точностью
коррекции в полете.
Повышенная точность «хранения» ортодромического курса, высокая инструментальная точность начальной выставки и коррекции гироскопов, возможность контроля за точностью ортодромического курса, а также наличие индикации текущего путевого угла в комплектации ТКС-П отличает систему ТКС от других курсовых систем.
В режиме ГПК используется один чувствительный элемент—курсовой гироскоп, у которого главная ось вращения и оси внутренней рамы расположены горизонтально и произвольно относительно осей самолета, а ось внешней рамы является курсовой осью и расположена вертикально.
Для выдачи сигнала курса используется сельсин-датчик, ротор которого укреплен на курсовой оси, а статор — на следящей раме. Первоначальная выставка и корректировка курса осуществляются двигателем, который разворачивает статор сельсина относительно ротора до значения текущего курса. Сигналы на двигатель подаются в режиме МК от ИД-3 через КМ-5, а в режиме ГПК от задатчика курса на пульте управления ПУ-11.
С сельсин-датчика сигнал курса подается на потребители. В режиме ГПК с течением времени накапливается ошибка из-за ухода главной оси гироскопа в азимуте.
Для компенсации ухода применена азимутальная коррекция, состоящая из электрического моста, образованного широтным и поправочным потенциометрами пульта управления ПУ-11, усилителя УШК и двигателя, который со скоростью ухода главной оси гироскопа в азимуте вслед за ротором поворачивает статор сельсин-датчика. Взаимное положение ротора и статора сельсин-датчика не изменяется, и ошибки гироскопа на потребители не выдаются.