

http://profbeckman.narod.ru/
минимизаторы энергетической функции должны быть устойчивыми (но не обязательно асимптотически устойчивыми) равновесиями.
Простейшим фазовым портретом является неподвижная точка на прямой.
В понятии устойчивость по Ляпунову реализуется идея малых отклонений решения дифференциального уравнения на промежутке времени [0,+ ] при небольших вариациях начальных данных этого решения.
x x y
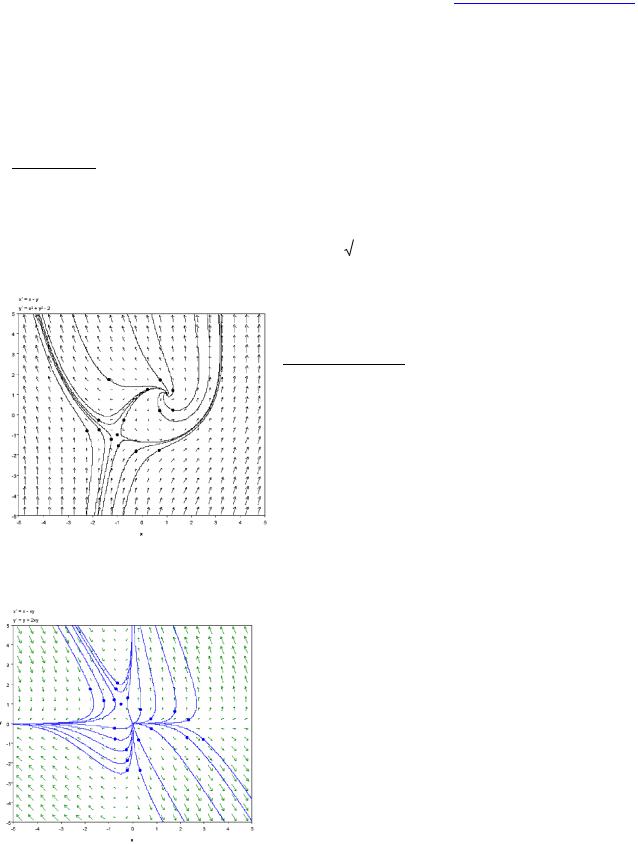
Пример 16. Система |
|
2 |
y |
2 |
2 |
имеет критические точки (1,1) |
и (-1;-1). Якобиан |
|||||||||||||||
1 |
1 |
|
y x |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
При |
(1;1) линеаризованная система |
имеет матрицу |
коэффициентов |
|||||||||||||||||||
J |
|
2y |
. |
|||||||||||||||||||
2x |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
1 |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
1 |
17 |
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
А |
|
2у |
. |
Собственное |
значение |
r |
|
|
|
. Критическая точка |
- нестабильное |
|||||||||||
|
|
|
|
|||||||||||||||||||
2х |
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
седло. |
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
Рис. 23. К примеру 16: (1;1) - нестабильный |
||||||||||||
|
|
|
|
|
|
|
|
|
|
фокус; (-1,-1) нестабильное седло. |
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
Пример |
17. |
Критические |
точки |
системы |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
(0;0) |
и (-0,5;1) Якобиан |
|
1 y |
x |
||||||
|
|
|
|
|
|
|
|
|
|
x x xy |
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
J |
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 y |
1 2x |
|||
|
|
|
|
|
|
|
|
|
|
y y 2xy |
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
При |
(0;0) |
матрица |
|
коэффициентов |
||||||||
|
|
|
|
|
|
|
|
|
|
линеаризованной системы А |
1 |
|
0 |
Она имеет |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
. |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
1 |
|
|
|
повторяющееся собственное значение r=1. У линейной системы нет нестабильного истинного узла (звезды). Но как нелинейная система имеет нестабильный узел. При (-1/2;1) линеаризованная
0 1/ 2
система имеет матрицу коэффициентов А . Собственное значение r=1 и -1.2 0
Критическая точка – нестабильное седло.
Рис. 24. К примеру 17: (0;0) – нестабильный узел; (- 1/2;1) – нестабильное седло.
14.10 Устойчивость решений дискретных уравнений
В дискретных динамических системах могут существовать частные решения, представляющие собой стационарные, периодические, квазипериодические и хаотические последовательности, которые мы будем обозначать xn*. Рассмотрим первое частное решение дискретной системы – стационарное, или решение в виде
неподвижной точки.
Точка x* называется неподвижной точкой отображения F(х*), если выполняется
условие: |
(26) |
x* = F(x*). |
Это условие означает, что при графической итерации отображения движение при попадании в x* прекращается. Итерации вновь и вновь помещают очередное xn в x*.
http://profbeckman.narod.ru/
Решение в виде неподвижной точки еще называется состоянием покоя или состоянием равновесия. Помимо самого факта существования в дискретных системах решений в виде неподвижных точек (состояний покоя или равновесия системы), важную роль играет информация об их устойчивости или неустойчивости. Устойчивость какоголибо состояния (движения) динамической системы определяется просто: введём небольшое отклонение (возмущение) динамической системы от исследуемого состояния и проанализируем, каким будет её дальнейшее поведение. Если со временем система вернется в исходное состояние (возмущение затухает), то такое состояние называется устойчивым. Если начальное отклонение нарастает со временем – состояние неустойчиво.
Найдем условия устойчивости неподвижной точки x*. В связи с тем, что проблема устойчивости связана с анализом реакции системы на малое возмущение ее состояния, на первом этапе она может быть исследована в рамках линейного приближения.
Пусть x = x* + , – отклонение от состояния равновесия, малая по сравнению с x* величина. Тогда отображение примет вид:
x*+n+1=F(x*+n). (27)
Применяя для правой части (27) разложение в степенной ряд в окрестности неподвижной точки и отбрасывая члены порядка малости выше первого, находим:
x* |
n 1 |
F(x* ) |
F |
|
|
n |
. |
(28) |
|
x |
|||||||||
|
|
|
|
|
|
||||
|
|
|
|
x* |
|
|
|
||
|
|
|
|
|
|
|
|
Производные берутся в точках частного решения, в данном случае в неподвижной точке x*. Тогда
n 1 |
|
F |
|
n . |
(29) |
|
x |
||||||
|
|
|
x* |
|
||
|
|
|
|
|
Введём обозначение aik |
|
fi |
|
|
|
. Здесь |
индексы i,k = 1,…, N – размерность |
xk |
|
|
|
||||
|
|
|
|
x |
* |
|
|
|
|
|
|
|
|
|
|
отображения. Тогда Ур. 29 можно переписать в координатной форме: |
|||||||
N |
|
|
|
|
|
|
|
ni 1 aik nk . |
|
|
|
|
|
|
(30) |
k 1 |
|
|
|
|
|
|
|
Данное линейное точечное отображение есть линейное дискретное уравнение в |
|||||||
вариациях. В матричной форме (30) можно записать в следующем виде: |
|||||||
n 1 A n . |
|
|
|
|
|
|
(31) |
Матрица А с элементами |
aik |
является |
квадратичной и называется матрицей |
||||
линеаризации или матрицей Якоби. Устойчивость неподвижной точки отображения определяется мультипликаторами k , которые являются собственными значениями матрицы А, или корнями характеристического уравнения:
det A E 0. |
(32) |
E – единичная матрица. Неподвижная точка x* исходного отображения (4) является устойчивой, если все мультипликаторыk удовлетворяют условию | k| < 1. Если среди мультипликаторов имеются такие, для которых | k| > 1, то неподвижная точка отображения (4) будет неустойчивой.
Рис. 25. Линеаризация в особой точке.
Прежде всего, рассмотрим устойчивость неподвижных
точек одномерного отображения |
|
Одномерное отображение: |
|
xn 1 f (xn ). |
(33) |



http://profbeckman.narod.ru/
ограничиться линейной частью этого уравнения. Тогда, обозначая a=fx, b=fy, c=gx, d=g
|
|
|
|
|
|
|
|
|
|
a |
|
|
b |
|
, |
или в матричной форме |
|
n 1 |
|
a |
b |
|
||||
получим уравнения в вариациях |
n 1 |
|
n |
n |
|
|
|
|
c |
n |
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
n 1 |
c |
n |
d |
n |
|
|
|
|
n 1 |
|
|
d |
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n |
||||||||||
Чтобы найти мультипликаторы неподвижных точек отображения или собственные |
||||||||||||||||||||||||||
значения |
матрицы |
|
линеаризации, |
необходимо найти корни |
характеристического |
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
b |
|
0. |
|
|
|
|||
уравнения. Для двумерного отображения оно имеет вид: det |
c |
|
|
|
|
|
||||||||||||||||||||
Характеристическое уравнение |
|
|
|
|
|
|
d |
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
2 (a d) (ad bc) 0. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
Его корни |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
(a d) |
|
|
|
(a d)2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
(ad bc) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
1,2 |
|
2 |
|
|
4 |
|
|
|
|
|
|
|
|
|
|
|
(36) |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
определяют |
поведение фазовых траекторий в окрестности неподвижной точки |
|||||||||||||||||||||||||
|
|
|
|
|
|
|
отображения. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
Перейдём теперь к анализу неподвижных точек в |
|
|
||||||||||||||||
|
|
|
|
|
|
|
двумерном отображении. |
|
|
|
|
|
|
|
|
|
||||||||||
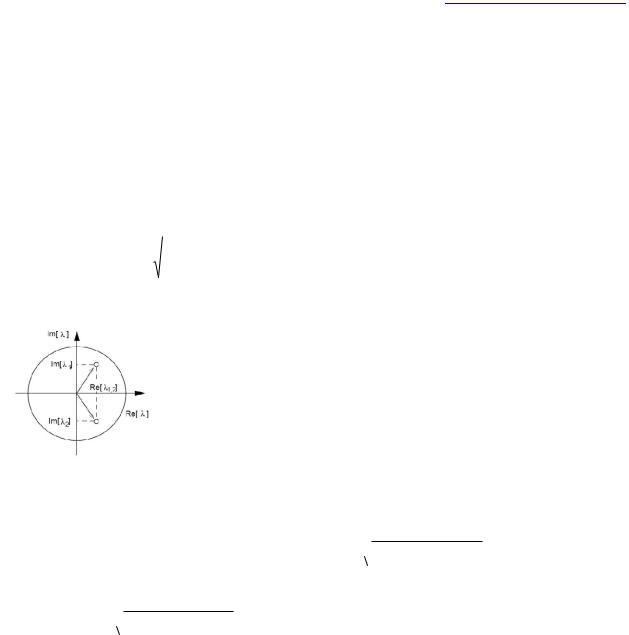
Рис. 27. Корни характеристического уравнения на комплексной плоскости.
Из Ур.36 следует, что собственные значения 1,2 могут быть действительными числами или комплексно сопряженными. Характер устойчивости неподвижной точки меняется при | 1,2|=1. Поэтому удобно характеризовать неподвижную точку,
изображая расположение собственных чисел 1 и 2 на комплексной плоскости относительно единичной окружности. Пара комплексно сопряженных значений | 1,2|<1, имеющие равные действительные части, а их мнимые части различаются только знаком.
Положение точек внутри окружности означает, что 
 Re2 1,2 Im2 1,2 1.
Re2 1,2 Im2 1,2 1.
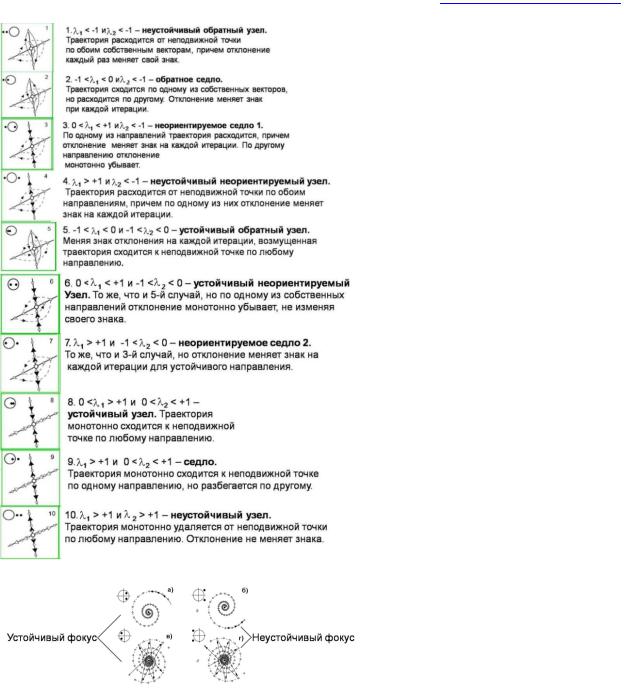
Случай комплексно сопряженных 1 и 2.
В данном случае неподвижная точка является фокусом.
Если r 
 Re2 1,2 Im2 1,2 1, то неподвижная точка называется устойчивым
Re2 1,2 Im2 1,2 1, то неподвижная точка называется устойчивым
фокусом. В этом случае точки итерации исходного отображения лежат на скручивающейся спирали с центром в неподвижной точке, которая в этом случае устойчива. Если r>1, то спираль раскручивается, удаляясь от неустойчивой неподвижной точки, которая в данном случае является неустойчивым фокусом. Характер сходимости возмущенной траектории к неподвижной точке меняется в зависимости от знака Re 1,2. Случай r=1 соответствует пограничной ситуации, когда возмущенная траектория не удаляется и не приближается к неподвижной точке, вращаясь вокруг нее с некоторой угловой скоростью.
Случай действительных 1 и 2.
http://profbeckman.narod.ru/
Рис. 28. Особые точки отображений.
Рис. 29. Фокусы в случае комплексно сопряженных корней.