


http://profbeckman.narod.ru/
позволяет проводить анализ на макро– и микроуровнях. Этот процесс определяется через последовательность сходящихся и расходящихся стадий и оказывается особенно полезным для описания и исследования большого числа развивающихся одновременно локальных подсистем, составляющих единое целое.
Методология нелинейных динамических систем, позволяет реализовать ситуацию, когда, при условии, что зависимая переменная однозначно детерминирована группой независимых переменных, невозможно заранее определить точное значение зависимой переменной в тот или иной момент времени. Имеет место высокая чувствительность к начальным условиям. Небольшие различия на старте могут существенно повлиять на развитие процесса, описываемого системой простых уравнений. В отличие от стохастической (беспорядочной) структуры, структуры детерминированного хаоса обладают устойчивостью возникающих в системе образований по отношению к малым возмущениям при видимой непредсказуемости. Установить эту устойчивость можно математически, хотя визуально (если смотреть зависимость какого-либо показателя, определяющего состояние системы от времени) случайный процесс и детерминированное поведение различить трудно.
Динамические системы подразделяют на два класса: консервативные (например, механические колебательные системы в отсутствие трения) и диссипативные. Для диссипативных сред характерно то, что режим динамики, возникающий в системе, предоставленной самой себе в течение длительного времени, становится не зависящем от начального состояния.
9.5Эволюция динамической системы
Втеории динамических (линейных и нелинейных) систем используются методы различных разделов математики: топологии и алгебры, фрактальной геометрии, теории меры, теории дифференциальных форм, теории особенностей и катастроф, математической статистики и теории вероятности и др. Математический аппарат последовательно развивается, начиная с дифференциальных уравнений первого порядка и их бифуркаций, с последующим анализом фазовых плоскостей, предельных циклов и их бифуркаций, и заканчивается уравнениями Лоренца, хаосом, итерированными картами, удвоением периода, перенормировкой, фракталами и странными аттракторами.
Нелинейная динамика – междисциплинарная наука, в которой изучаются свойства нелинейных динамических систем. Нелинейной называется теория, использующая нелинейные математические модели. Нелинейная динамика включает в себя теорию устойчивости, теорию динамического хаоса, эргодическую теорию, теорию интегрированных систем.
Хаос – детерминистическая нелинейная динамическая система, которая может продуцировать кажущиеся случайными результаты. Хаотическая система имеет фрактальную размерность и проявляет чувствительную зависимость от начальных условий.
Теория хаоса – математический аппарат, описывающий поведение некоторых нелинейных динамических систем, подверженных при определённых условиях явлению, известному как хаос (динамический хаос, детерминированный хаос). Поведение такой системы кажется случайным, даже если модель, описывающая систему, является детерминированной. Для акцентирования особого характера изучаемого в рамках этой теории явления, обычно принято использовать название: теория динамического хаоса. Примерами подобных систем являются атмосфера, турбулентные потоки, некоторые виды аритмия сердца, биологические популяции, общество как система коммуникаций и его подсистемы: экономические, политические, психологические и другие социальные системы.
Эргодическая теория – один из разделов общей динамики. Эргодичность – свойство некоторых динамических систем, состоящее в том, что в процессе эволюции почти каждое состояние с определённой вероятностью проходит вблизи любого другого состояния системы. Система, в которой фазовые средние совпадают с временными, называется эргодической. Такие системы можно описывать статистическими методами. Например,

http://profbeckman.narod.ru/
температура газа – это мера средней энергии молекулы. Естественно, предварительно необходимо доказать эргодичность данной системы. Для эргодических систем математическое ожидание по временным рядам должно совпадать с математическим ожиданием по пространственным рядам. Более простое объяснение: для расчёта/определения параметров системы можно долго наблюдать за поведением одного её элемента, а можно за очень короткое время рассмотреть все её элементы. В обоих случаях получатся одинаковые результаты, если система обладает свойством эргодичности.
Теория интегрируемых систем – раздел математической физики, изучающий недиссипативные решения дифференциальных уравнений, в том числе уравнений в частных производных. Такие системы имеют соответствующие высшие симметрии. Под интегрируемыми понимают такие системы, решения которых могут быть представлены в явном виде не сложнее, чем через квадратуры — интегралы, зависящие от начальных данных задачи.
Динамическая система является пространством состояний (S) множеством времен (T) и правилом (R) для эволюции R: SхT S, что дает следствие (s) в состояние s S. Динамическую систему можно рассматривать как модель, описывающую временную эволюцию системы.
Пространство состояний представляет собой набор координат, необходимых для полного описания системы. Учитывая текущее состояние системы, правило эволюции предсказывает следующее состояние или состояния. Помимо состояния, эволюционирующего во времени, модель может также зависеть от параметров, которые являются постоянными или, возможно, известными функциями времени, например, масса тел в механической модели или рождаемости в популяционной модели.
Пространство состояний может быть дискретным или непрерывным. Например, монета может быть смоделирована пространством состояний, состоящим из двух состояний: орёл и решка. В дискретном пространстве также может быть бесконечно много состояний; например, случайное блуждание может быть ограничено решеткой точек, а состояние системы - это просто та точка решетки, которая в настоящее время занята частицей.
Пространство состояний обычно называют фазовым пространством динамической системы, а траекторию движения изображающей точки в этом пространстве – фазовой траекторией.
Пространство состояний – один из основных методов описания поведения динамической системы. Движение системы в пространстве состояний отражает изменение её состояний. Фазовое пространство – набор элементов (называемых "точками"), представляющих возможные состояния системы в некоторый момент времени (обычно гладкое, конечномерное множество); совокупность всех допустимых состояний динамической системы; плоскость с осями координат, с отложенными переменными х и у, на которой представлено множество всех состояний системы так, что каждому возможному состоянию системы соответствует точка фазового пространства; пространство значений параметров системы.
Фазовое пространство динамической системы (пространство состояний) - множество всех её возможных состояний в фиксированный момент времени.
Фазовая траектория (орбита) - движение фазовой (изображающей) точки вдоль некоторой линии.
Состояние системы – характеристика системы на данный момент ее функционирования;
совокупность значений некоторых характеристик системы в данный момент времени. Поскольку система описывается определенным комплексом существенных переменных и параметров, то для того, чтобы выразить состояние системы, нужно определить значения, принимаемые ими в рассматриваемый момент. Состояние системы описывается вектором (портрет системы). Поскольку каждая система может иметь множество допустимых состояний, то говорят, что состояние системы в момент t — это вектор

http://profbeckman.narod.ru/
или точка в пространстве состояний системы. Описывает изменение состояния системы во времени эволюционный оператор.
Предельное множество – множество состояний, которое достигает математический объект, зависящий от времени (например, динамическая система), через бесконечный интервал времени. Это множество состояний, к которым объект неограниченно приближается при неограниченном возрастании (или убывании) времени.
Состояние динамической системы – некоторый параметр (число или вектор), позволяющий сделать однозначным определение ее выхода по входу. Различные начальные состояния приводят к различной реакции на одно и то же входное воздействие.
Пример. Для неуправляемого маятника состояние однозначно определяется углом и угловой скоростью =d /dt. В случае driving вождения фаза побуждения также необходима, и маятник тогда описывается неавтономной системой.
В пространственно распределённых системах состояние представляет собой поле (скалярное или векторное). Такое поле – функция с пространственными координатами, как независимыми переменными. Поле скоростей жидкости является известным примером.
Когда пространство состояний непрерывно, оно часто является гладким многообразием, его и называют фазовым пространством. Например, простой маятник моделируется как жесткий стержень, который подвешен в вертикальном гравитационном поле на стержне, вбитом в стену, что позволяет маятнику колебаться в плоскости. Согласно Ньютону, знание угла стержня относительно вертикали, θ, и угловой скорости, ν=dθ/dt, является достаточным для описания состояния маятника. Таким образом, фазовое пространство маятника представляет собой совокупность возможных значений θ и ν двумерного многообразия. Это многообразие является цилиндром, так как θ является периодическим. В дополнение к состоянию маятника модель также зависит от двух параметров: длины маятника и силы тяжести. Фазовое пространство также может быть бесконечным, например, функциональным пространством. Это относится к динамике, моделируемой дифференциальными уравнениями с частными производными.
Пространство состояний представляет собой совокупность всех возможных состояний динамической системы; каждому состоянию системы соответствует уникальная точка в пространстве состояний. Например, состояние идеального маятника однозначно определяется его углом и угловой скоростью, поэтому пространство состояний представляет собой совокупность всех возможных пар «(угол, скорость)». Пространство состояний (фазовое пространство) может быть конечным, состоящим всего из нескольких точек, но может состоять из бесконечного числа точек, образующих гладкое многообразие, что обычно для обыкновенных дифференциальных уравнений и отображений. В символической динамике это канторовское множество, которое является нульмерным. Число степеней свободы динамической системы есть размерность ее фазового пространства, это число переменных, которые необходимы для полного описания системы. В контексте гамильтоновых систем число степеней свободы – это число пар переменных состояния.
Динамическая система на многообразии обычно описывается уравнениями, используя эвклидовы переменные. Сложное поведение фазовых траекторий динамической системы может быть описано последовательностью символов.
Символическая динамика – практика моделирования топологической или гладкой динамической системы дискретным пространством, состоящим из бесконечных последовательностей абстрактных символов, каждый из которых соответствует состоянию системы с динамикой (развитие), данное оператором изменения. Объединяет динамические системы, для которых точками фазового пространства являются последовательности в некотором конечном алфавите «символов», а отображение заключается в сдвиге последовательности на один символ влево. Простейшими примерами являются сдвиг Бернулли и сдвиг Маркова. В символической динамике у таких понятий, таких как гетеро-
http://profbeckman.narod.ru/
и гомоклинические отображения есть особенно простое представление. В символической динамике время дискретно.
Топологическая динамика – раздел теории динамических систем, в которой качественные, асимптотические свойства динамических систем изучают с точки зрения общей топологии. Она довольно тесно связана с эргодической теорией динамических систем.
Топологическая динамическая система – топологическое пространство, вместе с непрерывным преобразованием и/или непрерывным потоком.
Пример. В случае неуправляемого маятника фазовое пространство имеет два размера, тогда как для ведомого маятника их три.
Размер фазового пространства бесконечен в случаях, когда состояние системы определяется полем.
Если возникающее новое состояние не однозначно определено предыдущим, это свидетельствует о том, что фазовое пространство не является полным. Известны два класса систем, в которых фазовое пространство является неполным: неавтономные системы и стохастические системы. Неавтономные системы имеют уравнение движения, которое явно зависит от времени. Закон, определяющий последующее состояние, зависит не только от текущего состояния, но и от времени эволюции системы. Однако есть простой способ сделать фазовое пространство полным: следует включить время в определение состояния. Для этого вводится новая переменная состояния . Тогда динамика описывается d /dt=1 или n+1=n в зависимости от того, является ли время непрерывным или дискретным.
Пример. Управляемый маятник – пример неавтономной системы. Для периодически возбуждаемого маятника фазу возбуждения также считают переменной состояния. Уравнение движения такого маятника d /dt=2 f где f – частота возбуждения (угловая частота привода равна
2 f).
В стохастической системе, число и характер переменных, необходимых для заполнения фазового пространства, обычно неизвестны. Поэтому следующее состояние не может быть выведено из настоящего и детерминированные законы заменяются статистическими. Вместо следующего состояния оно только оценивает вероятности всех точек в фазовом пространстве последующих состояний.
Фазовая траектория (орбита) – в случае непрерывного времени решение уравнения движения - кривая в фазовом пространстве, параметризованная переменная времени. Для дискретной системы это упорядоченное множество точек в фазовом пространстве.
Поток - отображение всего фазового пространства непрерывной динамической системы на себя для заданного шага времени t. Если t – бесконечно малый шаг времени dt, то поток просто задаётся правой частью уравнения движения (т. е. F). В общем случае поток для конечного шага по времени аналитически неизвестен, поскольку для его нахождения требуется решение уравнения движения.
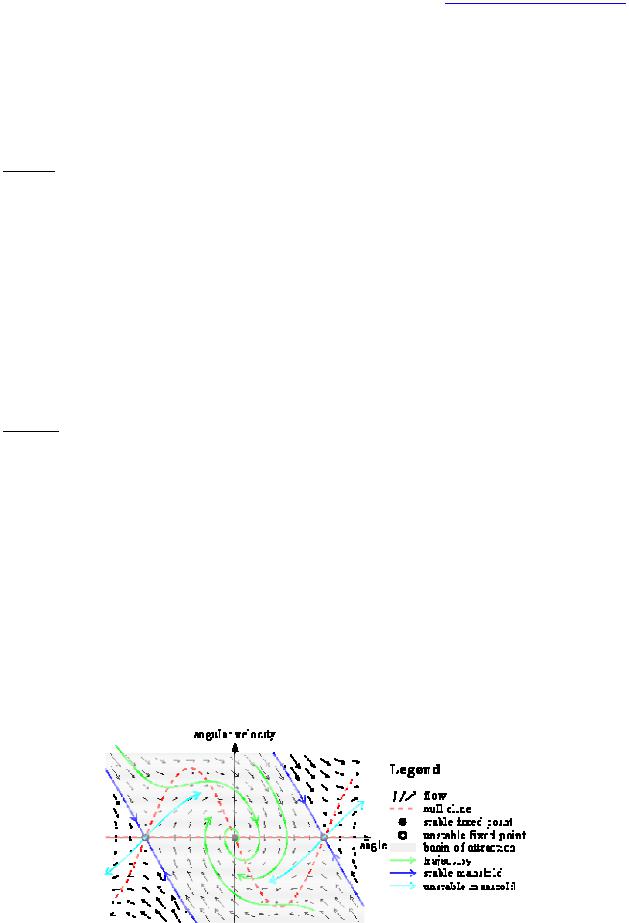
Рис. 1. Фазовая диаграмма колебания маятника.
http://profbeckman.narod.ru/
В качестве примера на рис.1 показан поток затухающего маятника. Черные стрелки векторного поля F тангенциальны на траекториях. На двумерном фазовом пространстве можно представить качественную картину потока и орбит. Сначала на рисунок наносят нулевые изоклины. Это прямые, рассчитанные в предположении, что производная по времени одного компонента переменной состояния равна нулю. Здесь один нулевой изоклин – это угловые оси, потому что временная производная угла равна нулю, когда угловая скорость равна нулю. В случае колебания маятника, другой нулевой изоклин= 02sin( / ). На этих нулевых изоклинах строят векторное поле вертикально или горизонтально. Между нулевыми изоклинами наносят векторное поле в направлении северо-восток, юго-восток, юго-запад или северо-запад. Направление определяется знаками производных d /dt и d /dt. В точках пересечения нулевых изоклин векторное поле равно нулю, т. е. d /dt=0 и d /dt=0. Эти точки называются неподвижными точками. Они соответствуют стационарным решениям. Неподвижные точки – неблуждающие множества. Они могут быть устойчивыми или неустойчивыми
В построении фазовых диаграмм существенную роль играет отображение Пуанкаре – тщательно подобранная (изогнутая) плоскость в фазовом пространстве, пересекаемая почти всеми орбитами. Это инструмент, разработанный Анри Пуанкаре для визуализации потока в фазовом пространстве более чем двух измерений. Сечение Пуанкаре на один размер меньше фазового пространства. Отображение Пуанкаре отображает точки сечения Пуанкаре на себя. Оно связывает две последовательные точки пересечения. Отметим, что подсчитываются только те точки пересечения, которые исходят с одной и той же стороны плоскости. Отображение Пуанкаре превращает непрерывную динамическую систему в дискретную. Если сечение Пуанкаре подобрано
тщательно, информация о качественном поведении
динамики не теряется. Карты Пуанкаре - это обратимые
карты, потому что можно найти un из un+1, следуя назад по фазовой траектории.
Рис.2 . Сечение Пуанкаре.
Неблуждающее множество набор – набор точек в
фазовом пространстве, обладающий следующим свойством:
все орбиты, начиная с точки этого множества, проходят сколь угодно близко и произвольно часто через любую
точку множества.
Неблуждающие комплекты бывают четырёх видов:
1)Фиксированные точки: стационарные решения. Для ненаправленного маятника и для маятника с вертикальным приводом – неподвижные точки.
2)Предельные циклы: периодические решения. Эти решения распространены,
например, в слабо управляемом маятнике.
3)Квазипериодические орбиты. Периодические решения с по меньшей мере двумя несоизмеримыми частотами (т. е. Отношение частот является иррациональным числом). В случае маятника эти решения встречаются только в незатухающем, но управляемом маятнике.
4)Хаотические орбиты. Связанные непериодические решения. Эти решения возникают в управляемом маятнике, если движение достаточно сильное.
Первые три типа могут также возникать в линейной динамике. Четвертый тип появляется только в нелинейных системах. Его возможность предсказал Анри Пуанкаре, а компьютеры превратили это ранее противоречивое поведение в широко распространенный опыт. Это странное поведение называли детермированным хаосом. На карте Пуанкаре предельные циклы становятся неподвижными. Неблуждающее множество
может быть как устойчивым, так и неустойчивым. Изменить стабильность

http://profbeckman.narod.ru/
неблуждающего набора можно изменением числа неблуждающих множеств в ходе бифуркации.
Помимо задания фазовых состояний системы в динамике важны законы эволюции.
Закон эволюции - правило, которое позволяет, если известно состояние системы в некоторый момент времени, определить состояние системы в любой другой момент времени.
Существование закона эволюции динамической системы эквивалентно предположению, что исследуемый процесс детерминирован и в прошлом и в будущем. Предполагается, что сам закон эволюции не зависит от времени, т.е. для любого значения t, t0 - результат эволюции в течение времени t стартующий в момент времени t0 не зависит от t0.
Вматематическом аппарате динамики время может быть дискретным или непрерывным или представлено топологической группой. Динамическая система с дискретным временем (пример – идеальная монета), оценивает свое состояние только после определенных дискретных интервалов. В случае броска монеты игнорируется процессы падения и отскока монеты, и состояние монеты анализируется только тогда, когда она достигла равновесия. Примеры систем с дискретным временем: динамика численности населения (дискретность, относящуюся к последующим поколениям), бильярд (учитываются состояния в момент ударов). Обычно дискретный временной интервал нормируется на единицу, поэтому множество допустимых времен задаётся целыми числами, чаще неотрицательными целыми числами. Это удобно даже для систем типа бильярда, в которых интервал между ударами может быть непостоянным.
Вматематике предпочитают обозначать дискретное время как набор значений в наборе целых чисел Z, а непрерывное – как набор реальных чисел R.
Обозначим X фазовое пространство динамической системы. Введем эволюционный оператор gt для времени t с помощью следующего соотношения: для любого состояния
x X системы в момент времени 0 состояние системы в момент времени t равно gtx, тогда gt: X → X.
Предположим, что закон эволюции не зависит от времени и существует оператор эволюции, так что справедливо тождество:
gs(gt+x) = gt+s(x).
Поэтому множество {gt} является коммутативной группой относительно операции композиции:
gsgt=gs(gt).
Обратным элементом к gt является g-t. Эта группа изоморфна Z или R для случаев дискретного или непрерывного времени соответственно. В случае дискретного времени такие группы называются однопараметрическими группами преобразований с дискретным временем (фазовыми каскадами). В случае непрерывного времени такие группы называются однопараметрическими группами преобразований (фазовые потоки).
Динамическая система – это триада (X, Ξ, G), где X – множество (фазовое пространство), Ξ либо Z, либо R, а G - однопараметрическая группа преобразования X (с дискретным временем, если Ξ = Z) Множество {gtx, t Ξ} называется траекторией или орбитой точки x X.
Замечание. Для случая дискретного времени gn = (g1)n.
Орбита точки x есть ...x, g1x, (g1)2x, (g1)3x. Обычно рассматриваются гладкие многообразия.
Пример 1 (вращение круга) X=S1=R/(2πZ), Ξ=Z, g1: S1→S1, g1x=x+α mod2 π, α R.
Пример 2 |
(обмотка тора ) X=T2 = S1×S1, Ξ=R, gt: T2→T2, |
x1 |
|
x1 |
t 1 mod 2 |
g |
|
|
|
||
|
|
t |
|
|
|
Пример 3 |
(экспонента) X=R, Ξ = R, gt: R → R, gtx = etx |
x2 |
|
x2 |
t 2 mod 2 |
|
|
|
|