

4.6.6. Перетворювачі сигналів.
П ринцип
перетворення напруги в цифровий код
полягає в наступному. Нехай датчик
вимірює значення деякого параметра,
який змінюється довільно, і видає напругу
пропорційну вимірюваній величині.
Діапазон можливих значень напруг датчика
умовно розбивається на рівні (рис. 4.82).
Відстань між рівнями береться однаковою
і має назву крок
квантування. Кожному
рівню привласнюється код (зазвичай
двійковий). Кількість рівнів діапазону
береться рівним 2n,
де n
– розрядність коду. На рис. 1 наведений
приклад, коли є вісім рівнів квантування.
В момент часу t
= 0 напруга на виході датчика має значення,
що знаходиться між першим і другим
рівнями, що відповідає значенню коду
001, який привласнений найближчому
нижньому рівню. В момент наступного
опиту t1
(Tоп
– час між черговими
опитами датчика) напруга дорівнює
четвертому рівню, код якого відповідає
100. В момент часу t2
напруга більша за шостий рівень, що
відповідає коду 110, і т.д. отже, перетворювач
формує і передає коди тих рівнів, які
дорівнюють або найближчі знизу до
миттєвого значення напруги на виході
датчика в момент опиту. Чим більше в
перетворювачі рівнів, тим менший крок
квантування і, відповідно, тим точніше
перетворення сигналу, що знімається з
датчика.
ринцип
перетворення напруги в цифровий код
полягає в наступному. Нехай датчик
вимірює значення деякого параметра,
який змінюється довільно, і видає напругу
пропорційну вимірюваній величині.
Діапазон можливих значень напруг датчика
умовно розбивається на рівні (рис. 4.82).
Відстань між рівнями береться однаковою
і має назву крок
квантування. Кожному
рівню привласнюється код (зазвичай
двійковий). Кількість рівнів діапазону
береться рівним 2n,
де n
– розрядність коду. На рис. 1 наведений
приклад, коли є вісім рівнів квантування.
В момент часу t
= 0 напруга на виході датчика має значення,
що знаходиться між першим і другим
рівнями, що відповідає значенню коду
001, який привласнений найближчому
нижньому рівню. В момент наступного
опиту t1
(Tоп
– час між черговими
опитами датчика) напруга дорівнює
четвертому рівню, код якого відповідає
100. В момент часу t2
напруга більша за шостий рівень, що
відповідає коду 110, і т.д. отже, перетворювач
формує і передає коди тих рівнів, які
дорівнюють або найближчі знизу до
миттєвого значення напруги на виході
датчика в момент опиту. Чим більше в
перетворювачі рівнів, тим менший крок
квантування і, відповідно, тим точніше
перетворення сигналу, що знімається з
датчика.
Якщо в системі є 2n рівнів, то відносна похибка перетворення = 2–n. Абсолютна похибка, що обумовлена квантуванням, дорівнює відстані між рівнями. Наприклад, при 256 рівнях квантування, тобто при 8–розрядному коді, відносна похибка в момент опиту = 1 / 256 = 0,4 %. За наведеною вище формулою виходячи з заданої відносної похибки можна розрахувати розрядність перетворювача.
Аналого-цифрові перетворювачі (АЦП) призначені для перетворення аналогової величини в цифровий код. За принципом отримання коду АЦП поділяються на два типи: ступінчасті та розрядного кодування. В ступінчастих АЦП код змінюється до потрібного значення сходинками, тому їх швидкодія нижча за швидкодію АЦП розрядного кодування. Під швидкодією тут мається на увазі час, потрібний на перетворення однієї вибірки вхідного сигналу в код. В АЦП ступінчастого типу для кодування використовується лічильник, який підсумовує лічильні імпульси. Тому такі АЦП іноді називають перетворювачами послідовного типу. В АЦП розрядного типу використовуються регістри або шифратори, що дозволяє під час кожного такту роботи перетворювача кодувати один, кілька або одразу всі розряди коду.
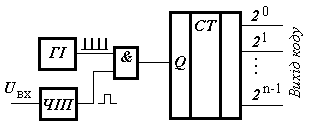
Схеми перетворювача напруги в код ступінчастого типу наведена на рис. 4.83-а. На вхід схеми подається напруга Uвх, яка за допомогою часово-імпульсного перетворювача (ЧІП) перетворюється в електричний імпульс. Тривалість цього імпульсу прямо пропорційна вхідній напрузі Uвх. В період tі дії імпульсу відкрита схема збігання & і на вхід двійкового лічильника СТ надходять імпульси стабільної частоти від генератора імпульсів ГІ. Стан кожного тригера лічильника відповідає розряду двійкового числа (20, 21, …, 2n–1). При надходженні на вхід лічильника певного числа N імпульсів за час tі тригери лічильника приймають деякий стан, який характеризує двійкове число, що пропорційне вхідній напрузі. В такий спосіб формується двійковий код, числове значення якого пропорційне вхідній напрузі.
а)
б)

Рис. 4.83.
Розглянутий перетворювач небалансний, оскільки не має зворотного зв’язку з виходом, тобто з кодом. Застосовуються також і балансні перетворювачі. Схема такого перетворювача наведена на рис. 4.83-б. Перетворювач коду в напругу ПКН, що включений на виході лічильника, перетворює код, що знімається з лічильника, в напругу керування Uк, пропорційну коду. При рівності напруг Uвх і Uк порівнювальний пристрій ПП припиняє видачу сигналу на схему І(&), в результаті чого перестають надходити імпульси на вхід лічильника, так як схема І(&) буде закрита. В цей момент код, що знімається з виходу лічильника, буде пропорційний вхідній напрузі.
Перетворювачі кута повороту в код. Широке розповсюдження отримали перетворювачі кутових переміщень в код, що уявляють собою кодуючий диск, який закріплений на валу вимірювального механізму.
Диск розбивається на концентричні кола, число яких дорівнює числу розрядів коду. На ці кола наносяться зображення коду. При повороті диска зчитуючий пристрій, що є нерухомим, фіксує код, який відповідає куту повороту диска. Кодуючий диск для 5–розрядного двійкового коду наведений на рис. 4.84.

а) б)
Рис. 4.84.
Зчитуючий пристрій для кодуючих дисків буває контактним, фотоелектричним та ін. При використанні контактного зчитуючого пристрою струмопровідні частини диска (на рис. затемнені) виготовляються з металу, а неструмопровідні (на рис. білого кольору) – з ізоляційних матеріалів. Зчитуючим пристроєм слугують контакти, що ковзають по кільцям диску. При виготовленні фотоелектричного зчитуючого пристрою затемнені частини диска (маска) виготовляються непрозорими для світла, а білі – прозорими (звичайно скло). Затемнені частини диска відповідають 0, а білі – 1. Диск з одного боку освітлюється світлом. З іншого боку диска розташовані нерухомі фоточутливі елементи (фоторезистори або фотодіоди). При кожному положенні диска освітлюються тільки ті фотодіоди, які відповідають 1.
Через неточне нанесення масок, а також неточне розташування зчитуючих пристроїв при зчитуванні кодів можуть виникати помилки. Наприклад, при переході від коду 00101 (рис. 4.84–а) до наступного коду при збільшенні кута повороту диска можуть бути помилково прочитані коди 00100 і 00111. Ще більша помилка може вийти при помилковому зчитуванні кодів 11111 (десяткове число 31) і 00000 (нуль). Для запобігання таких помилок були створені спеціальні коди для нанесення масок. До них відносяться циклічні коди, код Грея і ін. Диск з нанесеним циклічним кодом представлений на рис. 4.84–б, а значення циклічних кодів для чисел від 0 до 15 приведені в таблиці 4.1.
Таблиця 4.1.
Таблиця відповідності десяткового числа, двійкового числа і циклічного коду.
Десяткове число |
Двійкове число |
Циклічний код |
Десяткове число |
Двійкове число |
Циклічний код |
0 |
0000 |
0000 |
8 |
1000 |
1100 |
1 |
0001 |
0001 |
9 |
1001 |
1101 |
2 |
0010 |
0011 |
10 |
1010 |
1111 |
3 |
0011 |
0010 |
11 |
1011 |
1110 |
4 |
0100 |
0110 |
12 |
1100 |
1010 |
5 |
0101 |
0111 |
13 |
1101 |
1011 |
6 |
0110 |
0101 |
14 |
1110 |
1001 |
7 |
0111 |
0100 |
15 |
1111 |
1000 |
По таблиці, а також зображенням коду на диску можна встановити, що помилка зчитування тут не перевищує одного кроку квантування, оскільки коди, розташовані на межі, відрізняються один від одного тільки на один молодший розряд.
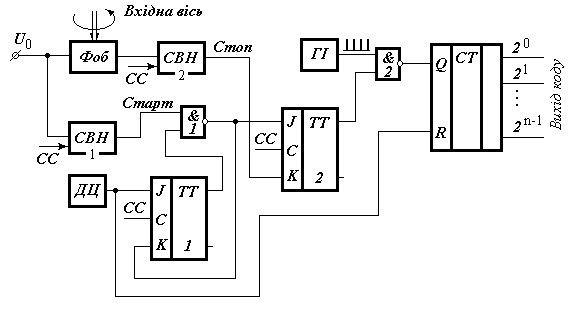
Крім дискових перетворювачів широке розповсюдження отримали перетворювачі фаза-часовий інтервал-код, у яких кутова величина спочатку перетворюється в кут зсуву фаз за допомогою фазообертувачів. На валу в таких перетворювачах встановлюються фазообертувачі, такі як сельсини, магнесини, трансформатори, що обертаються. Зсув фаз між опорною синусоїдальною напругою і напругою, що знімається з вихідної осі фазообертувача, пропорційний куту повороту фазообертувача. Схема такого перетворювача наведена на рис. 4.85-а, на якій: Фоб – фазообертувач; СВН1, СВН2 – схеми виділення нуля; ТТ1, ТТ2 – тригери; І(&)1, I(&)2 – схеми І; ДЦ – датчик циклів; ГІ – генератор імпульсів; U0 – опорна напруга; СТ – лічильник..
Перетворювач працює так. Імпульс датчика циклів встановлює лічильник СТ в нульовий стан і по задньому фронту синхросигналу СС перекидає тригер ТТ1, який тим самим відкриває шлях для проходження старт-імпульсу через схему співпадання І(&)1. Після подачі старт-імпульсу тригер ТТ1 перекидається в початковий стан і не дає можливості пройти наступним старт-імпульсам за цей же цикл перетворення. Старт-імпульс, пройшовши схему І(&)1, перекине тригер ТТ2, в результаті чого відкриється схема І(&)2 і імпульси від генератора імпульсів ГІ надійдуть на лічильник СТ. Імпульси на лічильник будуть надходити доки від СВН2 не надійде стоп-імпульс, який перекине тригер ТТ2 у початковий стан; в результаті припиниться надходження імпульсів від ГІ на лічильник через схему збігання І(&)2.
а)
б)

Рис. 4.85.
Часові діаграми роботи цього перетворення наведені на рис. 4.85-б.
На практиці така схема забезпечує перетворення кута повороту вимірюваної осі в діапазоні 0 360 з точністю 8–9 двійкових розрядів. Для підвищення точності перетворення застосовують двовідлікові перетворювачі, які дозволяють отримати точність перетворення до 12–13–го розрядів. В деяких випадках використовують і трьохвідлікові схеми перетворення, які забезпечують перетворення кута повороту з точністю 16–17 двійкових розрядів. Однак таким схемам перетворювачів притаманна певна складність електромеханічних пристроїв, де потрібне конструювання як високоточних редукторів і датчиків-фазообертувачів, так і електронних схем, які повинні забезпечити об’єднання кодів, отриманих від лічильників точного і грубого відліків схеми перетворювача.
Перевага розглянутого перетворювача в тому, що з джерела інформації – датчика – знімається аналогова величина, яка передається по звичайним кабелям; при цьому використовується двопровідна лінія зв’язку. В перетворювачах кодового типу (наприклад, дисках) необхідно передавати імпульсні сигнали, і якщо передача здійснюється на значні відстані, то пред’являються певні вимоги до лінії передачі (кабелю). Крім того, від цього датчика потрібно відвести стільки проводів, на скільки розрядів розрахований датчик, не враховуючи додаткових кіл комутації, призначених для забезпечення самої схеми перетворення. Позитивною рисою фазових перетворювачів є ще і те, що вони не вимагають розробки спеціальних датчиків (в них використовуються звичайні пристрої автоматики – сельсини і трансформатори, що обертаються).
Цифрово-аналогові перетворювачі. Двійкові коди в аналогові еквіваленти перетворюються різними способами, але всі вони основані на додаванні аналогових складових, пропорційних деяким двійковим приростам (елементам) вихідного двійкового числа.
За принципом отримання аналогових величин цифрово-аналогові перетворювачі (ЦАП) можна розділити на два типи: з сумуванням одиничних приростів аналогових величин і з сумуванням з урахуванням ваги розряду двійкового коду. В першому випадку вихідне число спочатку перетворюється в число–імпульсний код, тобто у відповідне число імпульсів. Потім кожному з цих імпульсів ставиться у відповідність постійний одиничний приріст аналогової величини. Всі прирости сумуються, в результаті чого на виході отримується аналогова величина – еквівалент вихідного коду. В другому випадку для кожного розряду коду, що перетворюється, підбирається еталонне значення аналогової величини, що відповідає вазі даного розряду. В процесі перетворення сумуються еталони для тих розрядів двійкового коду, в яких стоїть 1. Еталони, відповідні розрядам з нульовим значенням, в додаванні участі не беруть.
Перетворювач коду в напругу. Приклад схеми перетворювача двійкового коду в напругу представлений на рис. 4.86.
Ця схема основана на принципі сумування струмів, пропорційних вазі розряду двійкового коду. Ключі Кл0, Кл1, …, Клn–1 цієї схеми керуються від тригерів лічильника або регістра, з якого знімається перетворюваний код. При нульових значеннях розрядів перетворюваного коду ключі відкриті, при одиничних – закриті. Резистори R і r в цій схемі еталонні, причому R >> r. Джерело живлення даної схеми стабілізоване. Струми І0, що проходять по резисторам R, створюють на резисторах r, 2r, 4r, … падіння напруги Uвих, пропорційне перетворюваному двійковому коду. Завдяки тому, що опори на резисторах r, 2r, 4r, … подвоюються в залежності від ваги розряду, що приєднує струм І0, напруга на виході буде пропорційна значенню перетворюваного коду. Наприклад, число розрядів n = 3; перетворюваний код 1012 = 510. За умовою, R >> r, тому вважаємо, що І0 однаковий в усіх розрядах: Uвих = І0(21·r + 20·r + r) + І0r = 5·І0r.
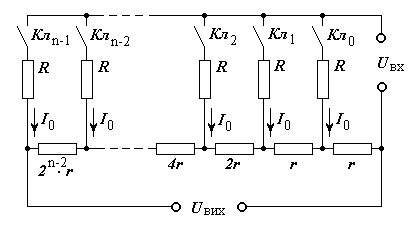
Рис. 4.86.
Перетворювачі коду в кут повороту часто називають цифровими слідкуючими системами. Одна з можливих схем цифрової слідкуючої системи наведена на рис. 4.87, де: СМ – суматор; ПКН – перетворювач коду в напругу; П – підсилювач слідкуючої системи; Дв – двигун виконавчого механізму слідкуючої системи; Р – редуктор; Д – датчик; ПВК – перетворювач «вал – код».
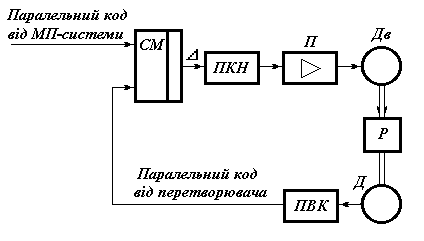
Рис. 4.87.
Схема працює так. На суматор цифрової слідкуючої системи надходять по двом каналам паралельні коди. Один код надходить від задаючого пристрою – МП–системи, а другий – від перетворювача «вал – код». В суматорі здійснюється віднімання цих кодів. Різниця кодів надходить на перетворювач коду в напругу ПКН, а з його виходу – на вхід підсилювача П слідкуючої системи. Підсилений сигнал передається на керуючу обмотку виконавчого двигуна слідкуючої системи. Двигун повертає датчик Д на кут, пропорційний вихідному коду суматора. Двигун Дв повертається доки різниця на виході суматора не буде дорівнювати нулю. В цьому випадку кут повороту двигуна або датчика буде з певною точністю відповідати вхідному двійковому коду.