

4.2. Структура мікропроцесорної системи.
4.2.1. Загальне уявлення про мікропроцесорну систему.
Мікропроцесорною системою (МП-системою) звичайно називають спеціалізовану інформаційну або керуючу систему призначену для накопичення, зберігання, обробки інформації і видачі результатів обробки в належному для подальшого використання виді.
М ікропроцесорна
система може розглядатися як окремий
випадок електронної системи, призначеної
для обробки вхідних сигналів і видачі
вихідних сигналів (рис. 4.2). Як вхідні і
вихідні сигнали при цьому можуть
використовуватися аналогові сигнали,
одиночні цифрові сигнали, цифрові коди,
послідовності цифрових кодів. Усередині
системи може відбуватись зберігання,
накопичення сигналів (або інформації),
але суть від цього не міняється. Якщо
система цифрова (а мікропроцесорні
системи відносяться саме до розряду
цифрових), то вхідні аналогові сигнали
перетворяться в послідовності кодів
за допомогою аналогово-цифрових
перетворювачів (АЦП), а вихідні аналогові
сигнали формуються з послідовності
кодів за допомогою цифро-аналогових
перетворювачів (ЦАП). Безпосередньо
обробка і зберігання інформації в
МП-системі здійснюється в цифровому
виді.
ікропроцесорна
система може розглядатися як окремий
випадок електронної системи, призначеної
для обробки вхідних сигналів і видачі
вихідних сигналів (рис. 4.2). Як вхідні і
вихідні сигнали при цьому можуть
використовуватися аналогові сигнали,
одиночні цифрові сигнали, цифрові коди,
послідовності цифрових кодів. Усередині
системи може відбуватись зберігання,
накопичення сигналів (або інформації),
але суть від цього не міняється. Якщо
система цифрова (а мікропроцесорні
системи відносяться саме до розряду
цифрових), то вхідні аналогові сигнали
перетворяться в послідовності кодів
за допомогою аналогово-цифрових
перетворювачів (АЦП), а вихідні аналогові
сигнали формуються з послідовності
кодів за допомогою цифро-аналогових
перетворювачів (ЦАП). Безпосередньо
обробка і зберігання інформації в
МП-системі здійснюється в цифровому
виді.
Сучасна МП-система уявляє собою комплекс двох невід’ємних складових – апаратного і програмного забезпечення. Апаратне забезпечення будується на основі мікропроцесорних засобів, яким і буде присвячений цей розділ.
Отже, якщо в попередніх розділах розглядалась робота електротехнічних пристроїв з точки зору електроенергетики, розглядались питання генерації, підсилення і перетворення електричної енергії, то в цьому розділі робота електронних пристроїв розглядається з точки зору інформаційних процесів, тобто електричні сигнали вже виступають як носії інформації, а електронні пристрої – як засоби для зберігання і перетворення самої інформації.
На рис. 4.3 представлена спрощена типова структура МП-системи, призначеної для обробки даних або керування деяким процесом, де: МП – мікропроцесор; ПЗП – постійний запам’ятовуючий пристрій; ОЗП – оперативний запам’ятовуючий пристрій; ППІ – паралельний периферійний інтерфейс; ПсПІ – послідовний периферійний інтерфейс. Приблизно таку ж структуру мають мікро-ЕОМ широкого призначення – комп’ютери.
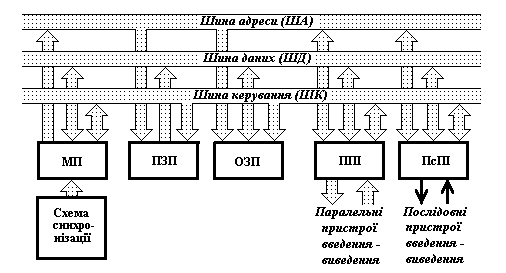
Рис. 4.3.
Почесне місце в цій структурі займає мікропроцесор (МП) – складний функціональний вузол, який може виконувати команди з певного набору команд, зокрема, безпосередньо виконує арифметичні і логічні операції над даними, його дії можуть бути зумовлені станом інших елементів МПС, виконуючи деякі команди, МП сам визначає стан цих елементів. Зазвичай МП може виконувати команди із обмеженого набору простих команд, таких як, наприклад «скласти два числа», «перевірити чи не є число нулем», «скопіювати фрагмент даних із однієї області пам’яті в іншу». Тому всі алгоритми обробки інформації будь-якої складності повинні бути перетвореними у послідовність таких команд. Виконуючи по-черзі команди такої послідовності, МП реалізує процес обробки інформації.
Робота МП відбувається під дією сигналів схеми синхронізації. Тому до складу типової структури МП–системи входить генератор тактових (синхронізуючих) імпульсів, який є джерелом послідовності прямокутних імпульсів. Він задає цикл виконання команди – інтервал часу, необхідний для зчитування команди з пам’яті і її виконання. Цикл команди складається з певної послідовності елементарних дій, що називаються станами (тактами). У деяких мікропроцесорів генератор тактових імпульсів знаходиться безпосередньо в МП, в інших генератор тактових імпульсів – зовнішній.
Щоб МП міг виконати задачу у відповідності із деякою програмою, команди програми повинні бути трансформовані в код, «зрозумілий» МП. Ці коди розміщуються і зберігаються в пам’яті системи. МП починає роботу, зчитуючи коди першої команди програми із пам’яті, розшифровує відповідну команду і виконує вказану в ній операцію. Потім процесор зчитує наступну по порядку команду програми і знову виконує вказану в ній операцію. Цей процес повторюється при послідовному переборі відповідних вічок пам’яті, де зберігаються команди програми. Певні команди змушують МП «перестрибнути» через кілька команд в сторону збільшення або зменшення номерів (адрес) вічок. В останньому випадку програма може повернути МП до повторного виконання команд програми. Отже можуть бути реалізовані алгоритми лінійної, розгалуженої або циклічної структур.
Подана на рис. 4.3 структура відображає магістрально-модульний принцип організації мікропроцесорних пристроїв і систем. Окремі блоки є функціонально закінченими модулями зі своїми вбудованими схемами керування, виконаними у вигляді однієї або декількох ІС, взятих в корпуси з відповідною кількістю виводів. Міжмодульні зв’язки і обмін інформацією між модулями здійснюється за допомогою колективних шин (магістралей), до яких мають доступ всі основні модулі системи. У кожний момент можливий обмін інформацією тільки між двома модулями системи. Магістральний принцип побудови сполучень модулів (інтерфейсу) МП-системи передбачає наявність інформаційно-логічної сумісності модулів, яка реалізовується шляхом використання єдиних способів представлення інформації, алгоритму керування обміном, форматів команд керування обміном і способу синхронізації в ІС одного мікропроцесорного набору.
Для МП-систем характерна тришинна структура магістралі, що містить шину адреси (ША), двонапрямну шину даних (ШД) і шину керування (ШК).
Шина даних – це двонапрямна шина, по якій дані можуть направлятись або до МП, або від нього.
Шина адреси – це шина, по якій інформація передається тільки в одному напрямку – від МП до модулів пам’яті або введення-виведення. Крім того, при наявності в МП–системі пристроїв із правом прямого доступу до пам’яті інформація у шину адрес може надходити від таких пристроїв.
В деяких випадках розробники іноді віддають перевагу мультиплексній шині. У магістралі з такою шиною немає виокремленних адресної шини та шини даних. Спочатку лінії мультиплексної шини використаються для адрес, потім вони використаються для даних. У випадку з окремими шинами адреси й дані можуть передаватися одночасно. Об’єднання ліній скорочує ширину й вартість шини, але система працює при цьому повільніше, оскільки передача адреси і даних рознесені в часі.
Шина керування служить для передачі сигналів, що обумовлюють взаємодію, синхронізацію роботи всіх модулів МП-системи і внутрішніх вузлів МП. Одна частина ліній шини керування передає сигнали, які генерує МП, а інша частина ліній передає сигнали до МП – це сигнали про стан елементів МП–системи.
В складних МП–системах, до складу яких входять багато різноманітних пристрої із різною швидкодією, наприклад, в персональних комп’ютерах, магістраль має розгалуження на кілька магістралей. В цьому випадку є окремі магістралі для зв’язку з повільнодіючими пристроями (принтер, клавіатура) і з швидкодіючими, в яких інформація передається достатньо великими блоками (жорсткі диски, дисплей).
Перевагою шинної структури є можливість підключення до МП-системи нових модулів, наприклад кількох блоків ОЗП і ПЗП, для отримання потрібної ємності пам’яті.
Для включення мікропроцесора в будь-яку МП-систему необхідно встановити єдині принципи і засоби його сполучення з іншими пристроями системи. Для цих цілей служить уніфікований інтерфейс, який являє собою сукупність правил і засобів, що встановлюють єдині принципи взаємодії пристроїв МП-системи. До складу інтерфейсу входять: апаратурні засоби з’єднання (роз’єми і зв’язки), номенклатура і характер зв’язків, програмні засоби, що описують характер сигналів інтерфейсу і їх часову програму, а також опис електрофізичних параметрів сигналів.
Для інтерфейсу введення-виведення характерні чотири функції:
буферизація інформації;
дешифрування адреси або вибір пристрою;
дешифрування команди;
синхронізація і керування.
Буферизація необхідна для синхронізації обмінів даними між процесором і периферійними пристроями. Дешифрування адреси потрібне для вибору конкретного пристрою введення-виведення в МП-системах кількох периферійних пристроїв. Дешифрування команди проводиться для пристроїв, які крім передачі даних виконують і інші дії, наприклад, перевірка наявності паперу в друкуючому пристрої. При реалізації будь-якої з перерахованих функцій необхідні синхронізація і керування процесами.
В МП-системі використовують спеціальні інтерфейсні ВІС для сполучення системи з периферійними пристроями. Для цих ВІС характерна універсальність, яка досягається шляхом програмної (або мікропрограмної) зміни функцій, що ними виконуються.
Простіші задачі розв’язують порти введення-виведення – схеми, що спроектовані (запрограмовані) для обміну даними з конкретними периферійними пристроями: прийому даних з клавіатури або зчитуючого пристрою, передачі даних на індикатори і т.п. Порт містить багаторежимний буферний регістр введення-виведення з логікою керування і виводами для підключення пристроїв введення-виведення. Можливості перепрограмування портів обмежені.
Якщо периферійні пристрої (ПП), що входять до складу МП-системи, виконують численні складні операції, то для сполучення використовують ускладнений інтерфейс, який називається периферійним адаптером, що програмується. Він містить набір вбудованих портів і інших регістрів, що полегшують програмування часового узгодження обміну з ПП. До одного адаптера, що програмується, можна підключити кілька ПП. Подібний інтерфейс вважають універсальним інтерфейсом широкого застосування, оскільки його можна сполучати майже із всіма ПП.
Як периферійні пристрої (ПП) в МП-системах використовуються клавіатура, дисплеї, накопичувачі на магнітних дисках, модеми, друкуючі пристрої, пристрої зв’язку з об’єктом керування і т.п.
Периферійні пристрої приєднуються до шин інтерфейсу (шин МП-системи) не безпосередньо, а через пристрої керування вводом-виводом (адаптери, карти, контролери, вживаються і ін. назви) − схеми паралельного периферійного інтерфейсу (ППІ) і послідовного периферійного інтерфейсу (ПсПІ), які обслуговують ПП з передачею інформації відповідно паралельним і послідовним кодом (далі буде). Наявність схем інтерфейсів, що програмно настроюються, робить достатньо гнучкою і функціонально багатою підсистему введення-виведення в МП-системі.
При включенні до складу мікро-ЕОМ або МП-системи пам’яті великої ємності і різноманітного периферійного обладнання з відповідними керуючими блоками – різними контролерами і адаптерами – конструкція мікро-ЕОМ або МП-системи виконується у вигляді кількох друкованих плат, взятих в спільний корпус. Габарити таких виробів, зокрема персональних комп’ютерів, як правило досить малі.