

2.3. Общие характеристики элементов автоматики
Каждый из элементов характеризуется какими-либо свойствами, которые определяются характеристиками. Некоторые из этих характеристик являются общими для большинства элементов.
Главной общей характеристикой элементов является коэффициент преобразования (или коэффициент передачи), представляющий собой отношение выходной величины элемента у к входной величине х, или отношение приращения выходной величины Δу (или dy) к приращению входной величины Δх (или dх). В первом случае К = у/х называется статическим коэффициентом преобразования, а во втором случае К' = Δу/Δх ≈ dу/дх при Δх → 0 — динами ч е с к им коэффициентом преобразования.
Связь между значениями х и у определяется функциональной зависимостью (см. рис. 2.3...2.6). Значения коэффициентов К и К' зависят от формы характеристики элемента или вида функции у = f(х), а также от того, при каких значениях величин они подсчи-тываются. В большинстве случаев выходная величина изменяется пропорционально входной, и коэффициенты преобразования равны между собой, т.е. К= К' = const.
Статический и динамический коэффициенты преобразования характеризуются величинами, имеющими размерность. Например, если размерность входной величины °С, а выходной а, то размерность коэффициента преобразования будет а/°С. Коэффициенты К и К' могут быть также выражены в относительных (безразмерных) величинах.
Безразмерным является относительный коэффициент преобразования, представляющий собой отношение относительного приращения выходной величины Δу/у к относительному приращению входной величины Δх/х:
![]()

Например, если изменение входной величины на 2 % вызывает изменение выходной величины на 3 %, то относительный коэффициент преобразования ηΔ= 3/2 = 1,5. Из последней формулы видно, что относительный коэффициент преобразования равен отношению динамического коэффициента преобразования к статическому. Следовательно, относительный коэффициент преобразования ηΔ размерности не имеет. Для преобразователя с пропорциональной характеристикой ηΔ= η= 1.
-
При работе элемента выходная величина у может отклоняться от требуемого значения за счет изменения внутренних его свойств (износа, старения материалов и т.п.) или внешних факторов (колебаний напряжения питания, окружающей температуры и др.), при этом происходит и изменение характеристики элемента (кривая у' на рис. 2.9). Возникающее отклонение называется погрешностью, которая может быть абсолютной или относительной.
Абсолютной погрешностью (ошибкой) называется разность между полученным значением выходной величины у' и ее расчетным (желаемым) значением:
![]()
Относительной погрешностью называется отношение абсолютной погрешности Ау к номинальному (расчетному) значению выходной величины у. В процентах относительная погрешность определяется как
![]()
В зависимости от причин, вызывающих отклонение, различают температурную, частотную, токовую и другие погрешности.
![]()
Если абсолютная погрешность постоянна, то приведенная погрешность также постоянна.
Погрешность, вызванная изменением характеристик элемента со временем, называется нестабильностью элемента.
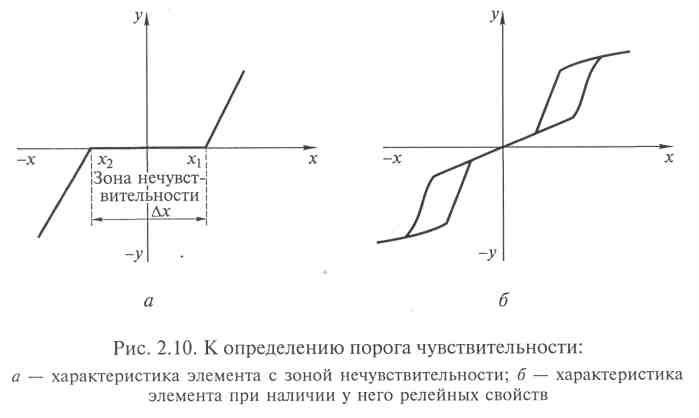
Порогом чувствительности называется минимальная величина на входе элемента, которая вызывает изменение выходной величины (т. е. уверенно обнаруживается с помощью данного датчика). Появление порога чувствительности обусловлено как внешними, так и внутренними факторами (трением, люфтами, гистерезисом, внутренними шумами, помехами и др.).
На рис. 2.10, а показана характеристика элемента при наличии «мертвого» хода. Из характеристики видно, что когда входная величина х изменяется в пределах от x1 до x2, то выходная величина у не изменяется и равна нулю. Значения х1 и х2 называются порогами чувствительности, а расстояние между хх и х2, равное Δх, — зоной нечувствительности. При наличии релейных свойств у элемента характеристика может приобретать реверсивный характер (рис. 2.10, б). В этом случае она также обладает порогом чувствительности и зоной нечувствительности.