

Выбор регуляторов на основании расчета

![]()
для объектов без
самовыравнивания — по формуле
![]()
где σф — фактическое отклонение регулируемой величины; τ— текущее время; μ— регулирующее воздействие, λ0 — возмущение по нагрузке.
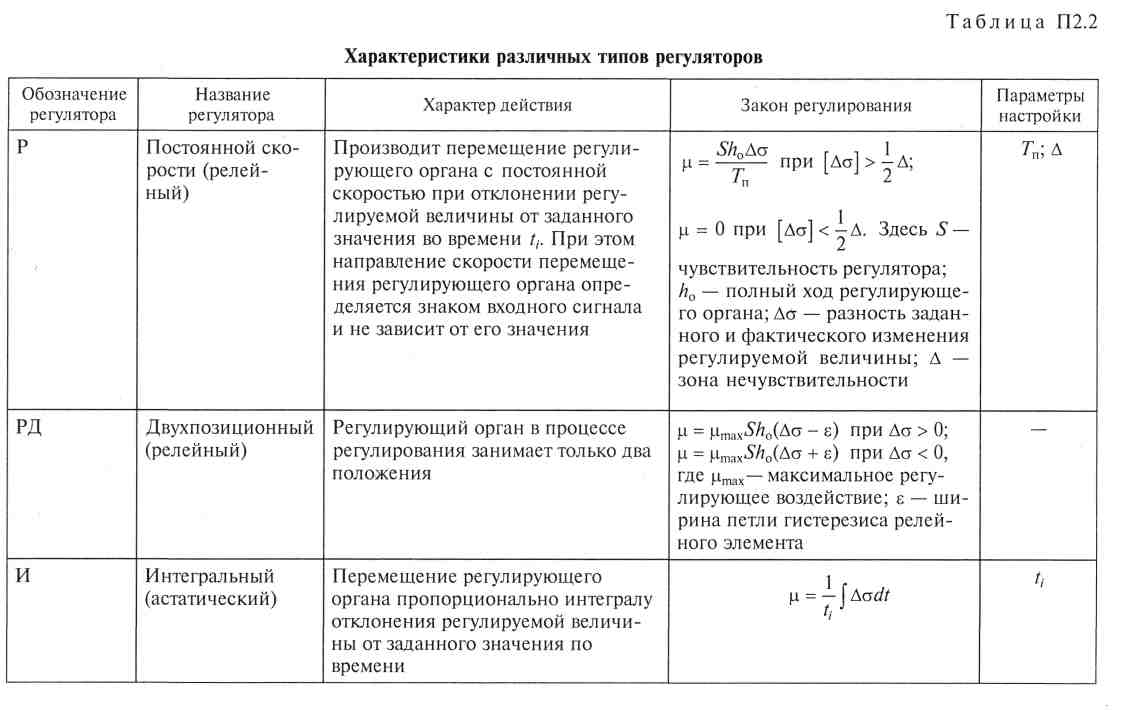
Характер переходного процесса, т.е. показатель качества регулирования, определяется динамическими свойствами объекта, выбранным законом регулирования и коэффициентами управления этого закона (параметрами настройки). Коэффициенты управления и законы регулирования для различных типов регуляторов приведены в табл. П2.2.
В соответствии с технологическими требованиями к системе автоматического регулирования необходимо выбрать такой закон регулирования, который в совокупности со свойствами регулируемого объекта обеспечил бы выполнение этих требований. Технологические требования к переходным процессам системы регулирования зависят от требований к конкретному технологическому процессу и его режима.
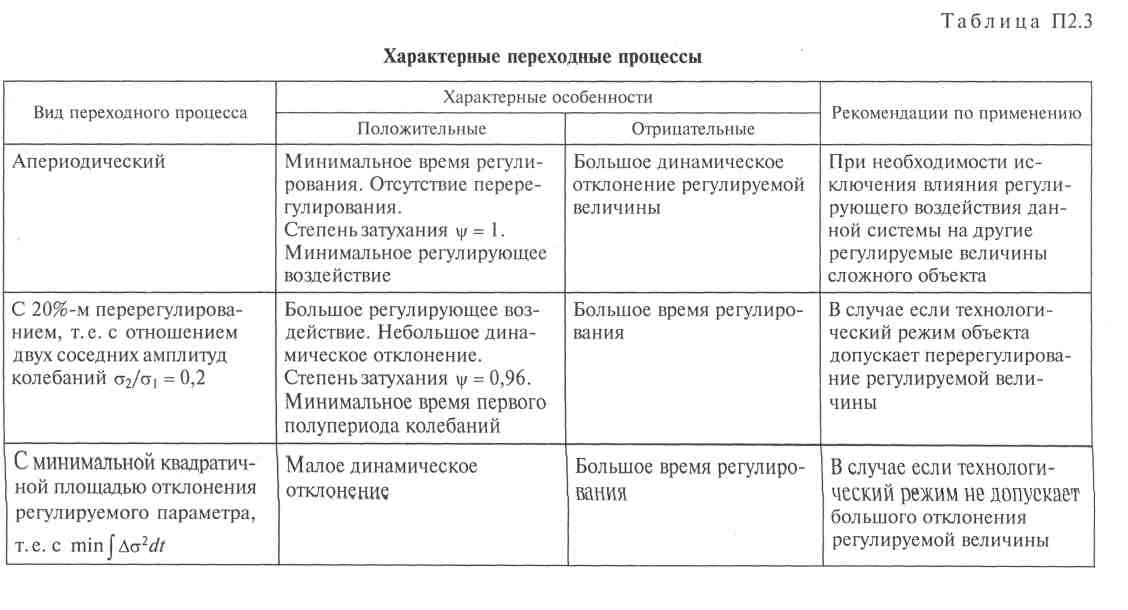
Большинству технологических требований удовлетворяют три характерных переходных процесса (табл. П2.3).
На основании приведенных в табл. П2.3 данных делаем вывод, что показателями переходных процессов являются:
апериодического — σ1 и tр (принимается σ1 > Δσ = 0,05);
с 20%-м перерегулированием —- σ1, t1 τ' (t1 — время первого полупериода колебаний; τ' — время вхождения регулируемой величины в заданную зону);
с минимальной квадратичной площадью отклонения регулируемого параметра — Δσ, S, τ', (Δσ — динамическое отклонение регулируемой величины; S — чувствительность регулятора).
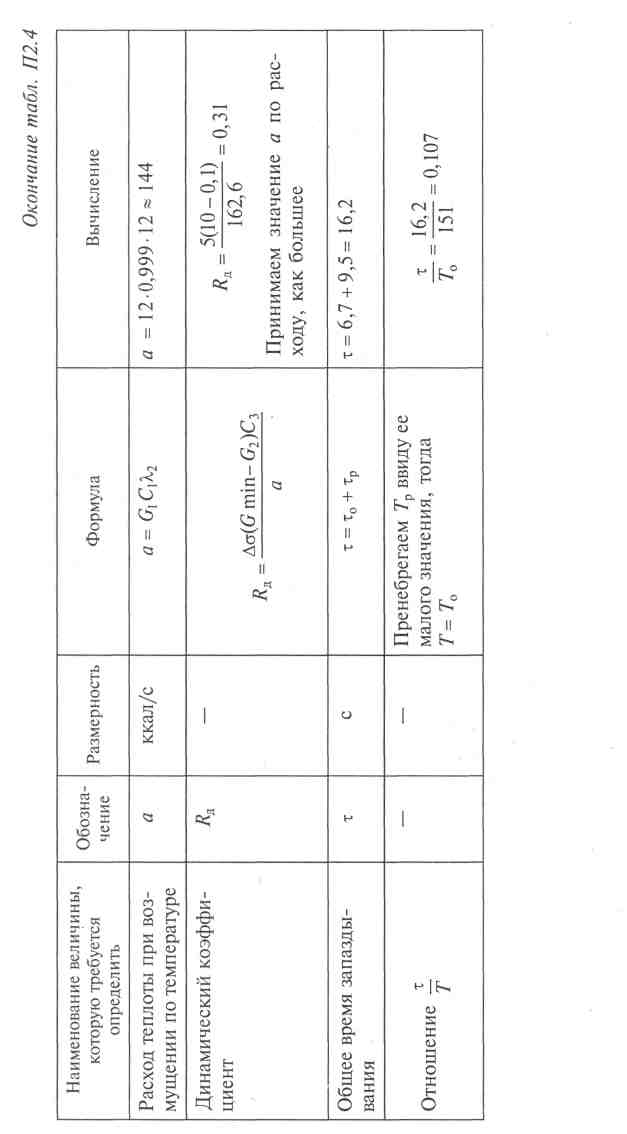
Пример выбора регулятора на основании расчета приведен в табл. П2.4.
Схема конкретного объекта регулирования для расчета представлена на рис. П2.2. Наибольшие значения k0 и Т0 достигаются при минимальной нагрузке, при которой и снимают кривую разгона.
После выбора регулятора производят следующие поверочные расчеты:

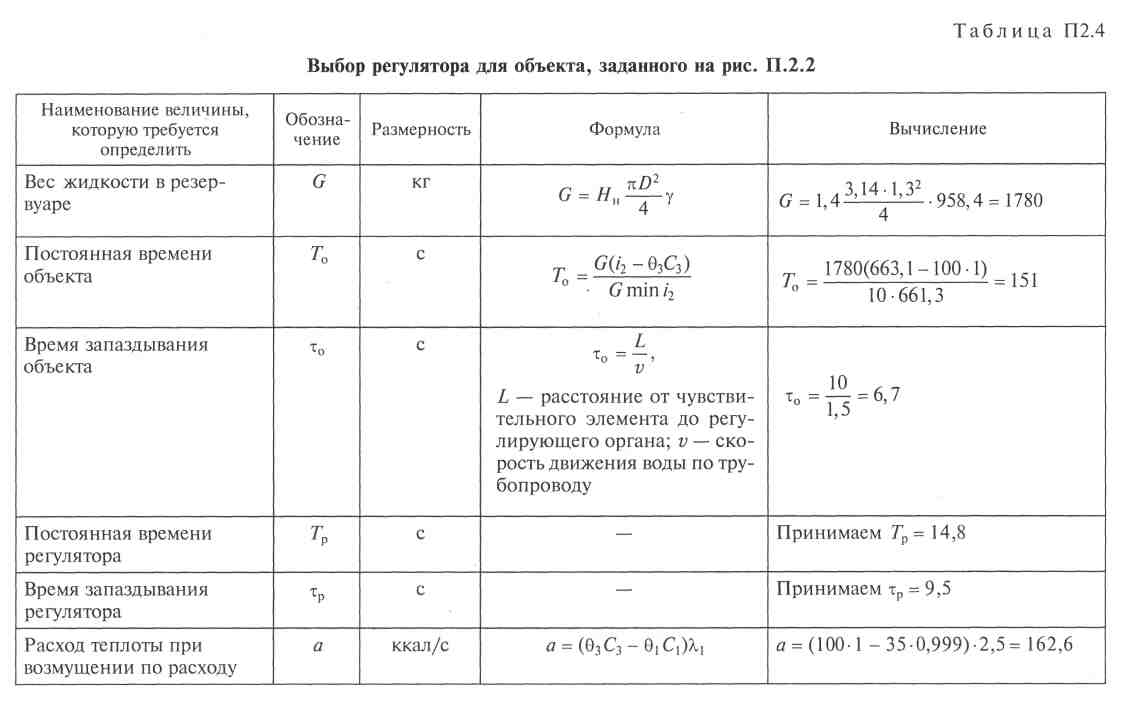
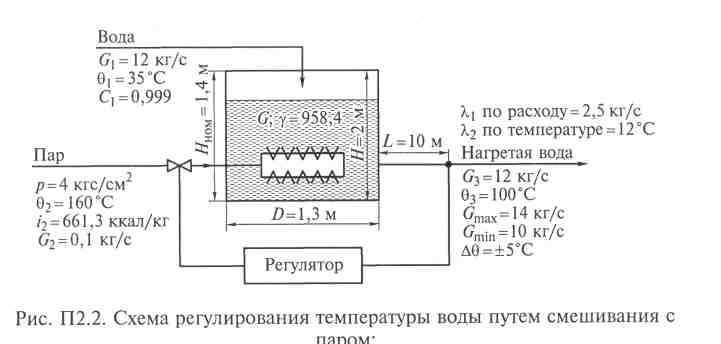
G1 — скорость подачи воды; G2 — скорость подачи пара; G3 — скорость выхода воды; θ1, θ2, θ3 — температура; С1С3 — удельная теплоемкость; р — давление пара; i2 — теплоемкость; G — вес воды в баке; γ — удельный вес воды; λ — регулируемая величина; Δθ — дополнительный диапазон колебаний температуры
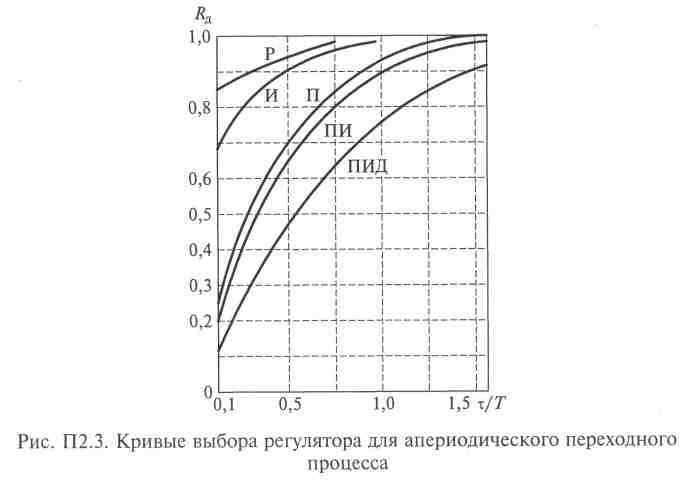
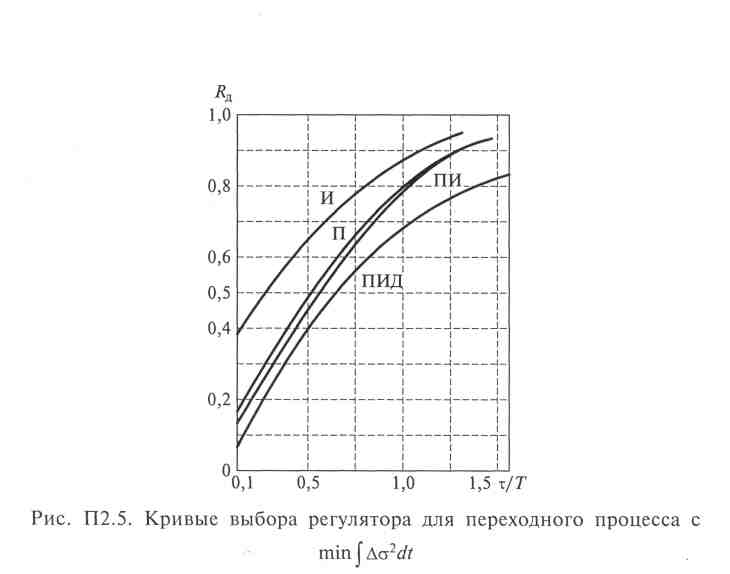
уточняют по кривым, показанным на рис. П2.3...П2.5, значение RД, которое должно быть меньше расчетного (для рассматриваемого примера выбираем П-регулятор с 20%-м перерегулированием, тогда по рис. П2.4 находим RД= 0,18);
по форме переходного процесса определяют максимальное динамическое отклонение регулируемой величины:
![]()
Здесь
![]()
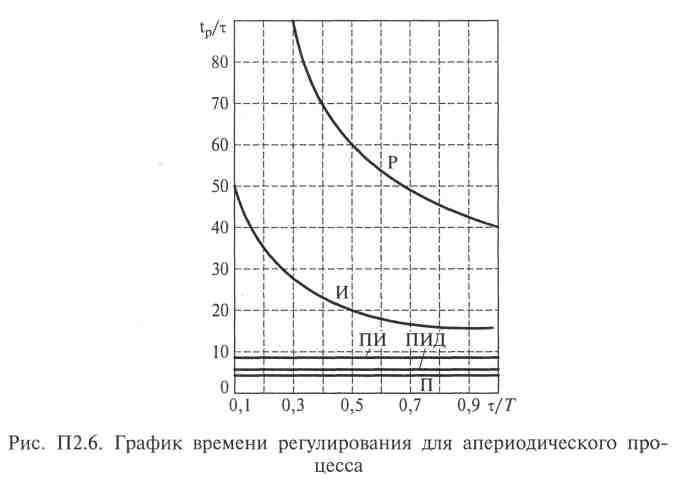
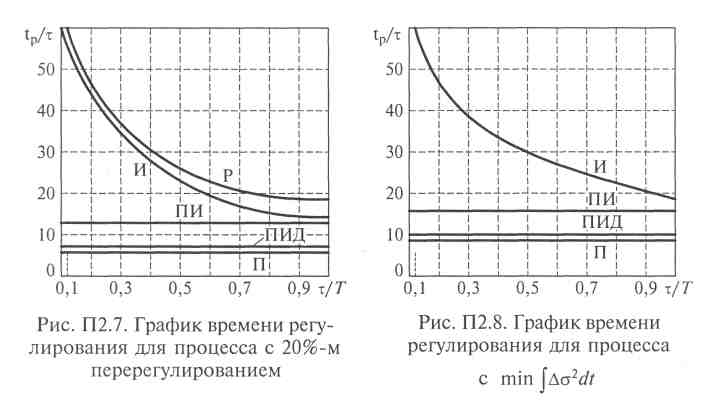
Тогда Δσ = 0,18 • 2,5 • 6,42 = 2,9 °С. По графикам, изображенным на рис. П2.6 ...П2.8, находят относительное время регулирования tр/τ0 для того же процесса на рис. П2.7. Оно равно 7, тогда tр = 7*16,2 = 113,4 с. Полученное значение должно быть меньше заданного по технологическим требованиям.
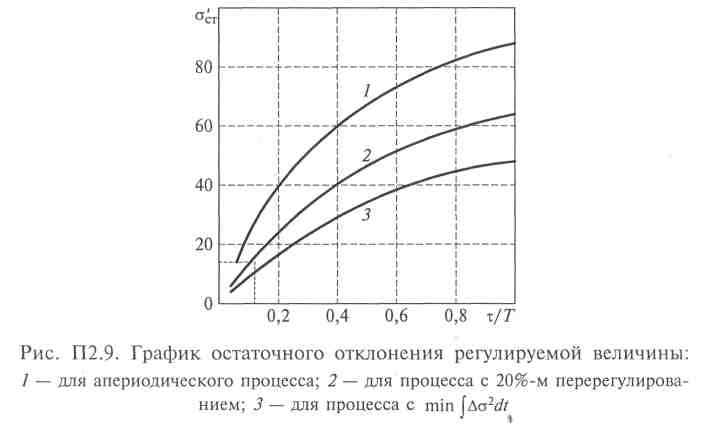
Для П-регулятора полученное время регулирования проверяют по допустимой статической ошибке аст путем нахождения ее относительного значения а'ст по графику, показанному на рис. П2.9, или по формуле
![]()
откуда
![]()
(при τ/Т0 = 0,107 по рис. П2.9 получаем σ'ст = 14 %). Тогда
![]()
Таким образом, выбранный регулятор обеспечивает технологические режимы регулирования.