

14.3. Линии связи
В системах передачи информации (и в системах телемеханики, в частности) основным элементом является линия связи. Именно в линии связи передаваемый сигнал подвергается наибольшим искажениям за счет воздействия естественных (а иногда и искусственно созданных) помех или шумов от самых различных источников.
Уровень шумов в линии связи принято характеризовать отношением мощности сигнала к мощности шума Рс/Рш, определяемым в децибелах. Обычно на выходе линий связи это отношение составляет 20...30 дБ.
По мере прохождения сигнала по линии связи его мощность из-за наличия активных потерь уменьшается, т.е. линия связи вызывает определенное затухание сигнала. Затухание численно определяет, во сколько раз уменьшается мощность сигнала при прохождении его по линии связи определенной протяженности. Для измерения затухания используют логарифмическую единицу отношения непер (Нп). Затухание 1 Нп/км означает, что мощность сигнала при прохождении 1 км уменьшается в е = 2,72 раза. Чем меньше затухание в линии связи, тем на большее расстояние можно передать по ней сигнал без дополнительного усиления, т.е. тем больше дальность действия линии связи.
Как уровень шумов, так и затухание в линии связи не одинаковы на различных частотах. Поэтому для передачи сигналов выбирают такие диапазоны частот, на которых мощность шумов и затухание имеют минимальные значения. Диапазон частот, в котором обеспечивается передача сигналов при заданных уровне шумов и затухании, называется полосой пропускания Δf линии связи.
Наиболее полно линия связи характеризуется информационными параметрами и прежде всего пропускной способностью. Под пропускной способностью понимают максимальное количество информации, которое можно передать по линии связи в единицу времени без ошибок. Пропускная способность определяется по формуле Шеннона, бит/с:
С=ΔFlog2(1 + Рс/Рш).
Таким образом, увеличить пропускную способность линии связи можно расширением полосы пропускания Δf , увеличением мощности сигнала Рс и снижением мощности шума Рш.
Рассмотрим основные виды линий связи.
Практически во всех системах телемеханики применяются электрические линии связи, в которых для передачи сообщений используются электромагнитные колебания. Для работы под водой находят применение акустические линии связи.
Электрические линии связи принято делить на две большие группы: проводные и беспроводные, а проводные линии, в свою очередь, подразделяются на воздушные и кабельные.
Воздушные линии связи — это стальные, медные или биметаллические провода, с помощью изоляторов прикрепленные к опорам. Уровень шумов и затухание в таких линиях довольно высоки, поэтому полоса пропускания их составляет 150... 160 кГц. Надежность воздушных линий также низкая.
Значительно более высокие характеристики имеют подземные кабельные линии связи. Полоса пропускания подземных симметричных кабельных линий достигает 1 МГц, коаксиальных — 50 МГц и более. Благодаря широкой полосе пропускания и высокой надежности кабельные линии широко применяются для обеспечения дальней связи, хотя стоимость их сравнительно высока.
Для компенсации затухания сигнала при передаче его на большие расстояния через каждые несколько десятков километров в линию включают промежуточные усилители. В настоящее время в кабельных линиях связи стало возможным использование оптического диапазона за счет применения лазеров и волоконной оптики. Это резко повышает полосу пропускания кабельных линий.
Для снижения стоимости телемеханических систем в качестве линий связи стремятся использовать линии, предназначенные для других целей. Так, широкое применение для передачи сигналов телемеханики находят линии электропередачи, которые кроме выполнения своей основной функции — передачи электрической энергии постоянного или переменного тока промышленной частоты 50 Гц обеспечивают передачу сигналов телемеханических систем на частотах от 30 до 500 кГц. При этом используется специальная аппаратура подсоединения и обработки (АПО).
В качестве линий связи в телемеханике используют также контактные сети, предназначенные для электрического транспорта.
Для передачи телемеханических сигналов на большие расстояния в целях управления подвижными объектами и в космических системах применяют беспроводные линии связи: радио и лазерные.
Для передачи сигналов телемеханики по радиолиниям используют диапазон дециметровых волн (от 300 до 3000 МГц), в котором достаточно низкий уровень шумов. Для увеличения дальности действия сигнала и уменьшения помех в передатчиках и приемниках радиолинии используют остронаправленные антенны. Практически радиоволны дециметрового диапазона могут использоваться только в пределах прямой видимости, которая ограничена кривизной земной поверхности. Поэтому передачу сигналов
14.6.
Радиорелейная линия с использованием
искусственного спутника Земли
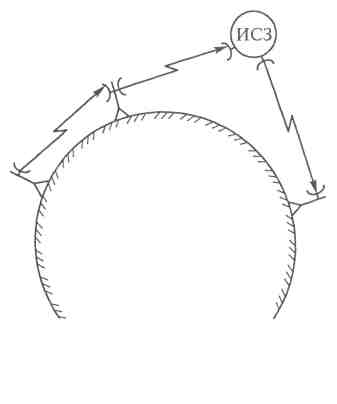
Огромными возможностями обладают лазерные линии связи, в которых может использоваться чрезвычайно широкий диапазон частот от радиоволн до видимого света (105...2,3 • 1018 Гц). Излучения этого диапазона довольно быстро затухают в земной атмосфере, поэтому применение беспроводных лазерных линий связи наиболее перспективно для космических систем, а в земных условиях они используются только на расстоянии не более десятка километров.
В настоящее время специальные линии связи, предназначенные только для передачи телемеханической информации, используются лишь при небольших расстояниях между ПУ и КП (например, в пределах одного предприятия), а также для управления подвижными объектами.
В линиях связи и сетях связи общего назначения для передачи сигналов систем телемеханики предоставляются в основном каналы двух типов: телефонные (тональной частоты — ТЧ) и телеграфные (тональноготелеграфирования — ТТ), параметры которых стандартизированы. Диапазон пропускаемых частот телефонного канала от 300 до 3400 Гц, телеграфного — от 0 до 120 Гц. Для высокоскоростных систем передачи данных могут предоставляться широкополосные каналы с полосой пропускания до 12 МГц и более, параметры которых также стандартизированы.
Устройства телемеханики могут занимать (или абонировать) каналы связи постоянно либо лишь на время передачи сигнала. В первом случае канал называется выделенным, во втором — коммутируемым. В зависимости от возможного направления передачи сигналов различают каналы симплексные (сигналы передаются в одном направлении), дуплексные (возможна передача сигналов в обоих направлениях одновременно) и полудуплексные (направление передачи сигналов может быть изменено в любой момент времени).
Использование стандартных каналов связи, естественно, требует унификации и стандартизации как самих телемеханических устройств, так и сигналов, несущих информацию.