

Выбор регуляторов
Основным вопросом при выборе регуляторов является вопрос правильности определения характеристики регулятора применительно к динамическим свойствам объекта.
При отсутствии регулятора внесенное возмущение вынуждает регулируемую величину объекта изменяться по некоторой кривой, определяемой свойствами данного объекта. Максимальное отклонение регулируемой величины в этих условиях зависит от значения возмущения
![]()
где р — коэффициент, отражающий свойства объекта; λ0 — значение возмущающего воздействия.
Продолжительность отклонения регулируемой величины определяется временем действия возмущения на объект. Если включить регулируемый объект в систему регулирования, то можно уменьшить абсолютное значение отклонения σmах и время, в течение которого это отклонение будет продолжаться.
Однако регуляторы с различными характеристиками обеспечивают разные результаты регулирования, что вызывает необходимость их выбора в соответствии со свойствами регулируемого объекта. При правильно выбранном регуляторе и соответствующей его настройке степень затухания процесса регулирования должна быть примерно равна 0,75 (при этом значении обеспечивается наиболее благоприятное изменение регулируемой величины).
Выбор регуляторов на основании ориентировочных сведений о проектируемом объекте
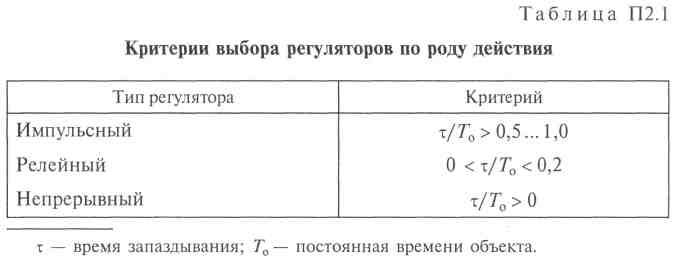
При отсутствии сведений о динамических свойствах проектируемого объекта выбор регуляторов следует производить по аналогии с действующими объектами или же на основании предположительных соображений о свойствах данного объекта, учитывая при этом критерии, приведенные в табл. П2.1.
Двухпозиционные регуляторы применяются для объектов без большого запаздывания, обладающих большой емкостью, при постоянной или очень мало меняющейся нагрузке и соблюдении условия 0 < τ/Т0 < 0,2.
![]()
Эти регуляторы применяются также для объектов с одной емкостью, не обладающих свойством самовыравнивания. Хорошая работа двухпозиционных регуляторов во многом зависит от инерционности чувствительного элемента, которая должна соответствовать инерционности объекта.
Для двух- и более емкостных объектов двухпозиционное регулирование применяется редко: только в тех случаях, когда не требуется большая точность поддержания регулируемой величины.
И-регуляторы применяются для объектов с самовыравниванием, небольшим запаздыванием, имеющих любую мощность, при медленно меняющейся нагрузке.
Для получения оптимального переходного процесса в системе астатического регулирования необходимо выполнение следующих условий:
объект должен быть статическим;
постоянная времени объекта Т0 должна быть в пределах 2 ...40 с;
время емкостного
запаздывания процесса в системе
регулирования должно![]() составлять
не более 1/10 от постоянной времени
объекта, т.е.
составлять
не более 1/10 от постоянной времени
объекта, т.е.
скорость перемещения регулирующего органа и коэффициент усиления регулятора должны выбираться в соответствии с емкостью объекта.
Также И-регуляторы с постоянной скоростью хорошо работают в объектах регулирования уровня, давления и температуры, но при обязательном условии, что чистое запаздывание т и время разгона Т0 малы, а постоянная времени объекта Т0 составляет не более 30...40 с. При этом чем больше емкость объекта, тем больше должна быть скорость перемещения регулирующего органа, а следовательно, и скорость регулирования.
где
ТП
—
время перемещения регулирующего органа;
Δ — зона нечувствительности
регулятора; А
— некоторая
постоянная, зависящая от свойств объекта
и характера возмущения.
![]()
При этом чем меньше ТП, тем больше должна быть зона нечувствительности Δ.
Устойчивое регулирование И-регулятор обеспечивает при условии
![]()
где R — коэффициент сопротивления (по выходу); С — коэффициент емкости объекта.
При регулировании уровня воды в баке коэффициент сопротивления
![]()
где H — уровень воды; Q— расход воды.
При регулировании температуры жидкости в баке коэффициент сопротивления
![]()
где tп — потенциальное значение температуры; Q0 — количество теплоты, вносимое в объект; Qs — количество теплоты, уносимое из объекта.
П-регуляторы применяются в объектах со средней емкостью, небольшим запаздыванием и при небольших изменениях нагрузки. Большей частью они применяются для одноемкостных объектов, реже для двухъемкостных. Для многоемкостных объектов пропорциональные регуляторы применяются ограниченно.
П-регуляторы могут обеспечить устойчивое регулирование объекта с самовыравниванием при условии
![]()
где кр и к0 — соответственно коэффициенты передачи регулятора и объекта; σст — статическая ошибка, и объекта без самовыравнивания при условии
![]()
ПИ-регуляторы применяются в объектах с любой емкостью, большим запаздыванием и при большой, но медленно меняющейся нагрузке.
Для объектов многоемкостных эти регуляторы применяются при τ > > 0,1Tо.
ПД-регуляторы применяются в объектах со средней емкостью, при большом времени запаздывания и при малых изменениях нагрузки.
ПИД-регуляторы применяются в объектах с любой емкостью, очень большим запаздыванием и при больших и резких изменениях нагрузки.
Эти регуляторы нецелесообразно применять для объектов, в которых τ/T0 > -1.