

МикроЭвм и микроконтроллеры в системах управления технологическими процессами
Внедрение микроЭВМ в системы управления технологическими процессами наряду с упрощением замены элементной базы и определенным расширением функций управляющей аппаратуры открывает принципиально новые возможности в построении децентрализованных или распределенных комплексов. Децентрализация в этом случае предполагает не только рассредоточение аппаратуры, но и распределение функций обработки информации и управления между автономными микроЭВМ. Подобные системы могут также включать в свой состав и центральную ЭВМ, выполняющую функции оптимизации, учета, планирования и координации работ.
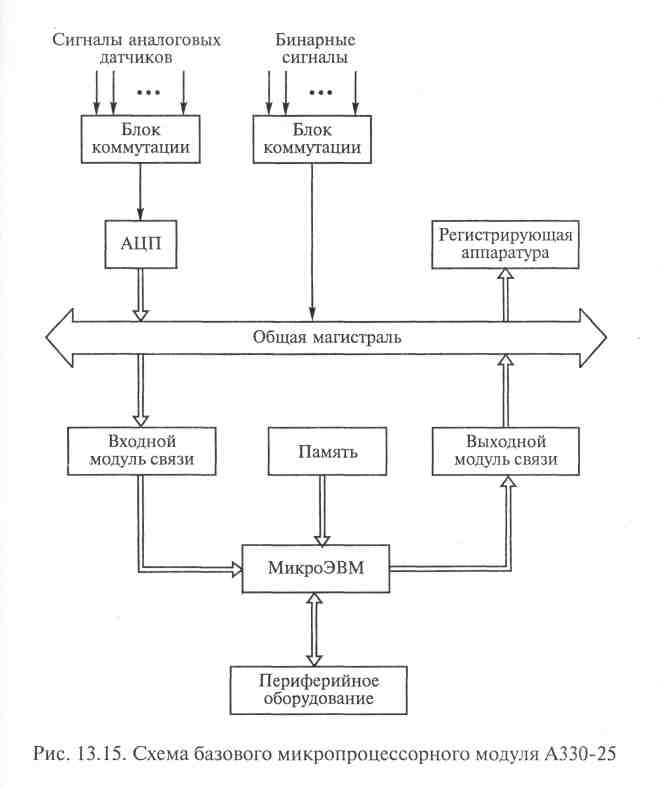
Примером реализации соответствующего централизованного контроля и управления служит комплекс А360-34 с базовым модулем А330-25, выполненный на микроЭВМ «Электроника С5-02». Наряду со сбором, измерением, обработкой информации и регистрацией управляемых процессов этот комплекс обеспечивает также формирование оптимальных воздействий, поступающих на объект управления.
Схема базового микропроцессорного модуля А330-25 представлена на рис. 13.15. В состав этого устройства входят: блоки коммутации бинарных сигналов и сигналов аналоговых датчиков, имеющие по 40 входов; АЦП; входной и выходной модули связи; перепрограммируемая память; периферийное и регистрирующее оборудование, обеспечивающее ввод данных и программ, а также вывод информации на видеоконтрольное и алфавитно-цифровое печатающие устройства.
Одной из важнейших функций многоконтурных систем управления является сбор информации от многих десятков и сотен датчиков. Для эффективного решения задачи дистанционного сбора информации используют так называемые вынесенные измерительные станции, которые могут обрабатывать аналоговые сигналы датчиков и передавать выходные цифровые сигналы (по недорогой линии в виде скрученной пары проводов) в центральный процессорный блок.
Вынесенные измерительные станции включают в себя собственный микропроцессор, мультиплексор и аналого-цифровой преобразователь, что позволяет обходиться без сложных и дорогих кабельных линий, а также схем обработки сигналов, необходимых для их передачи в центральный блок обработки данных.
Вынесенные микропроцессоры позволяют также разгрузить центральный процессорный блок от многих дополнительных за-
дач, связанных с реализацией локальных функций управления в одноконтурных системах.
Регуляторы одноконтурных систем могут реализовываться с использованием различных принципов их построения. Наибольшее распространение получили регулирующие микроконтроллеры — ремиконты, служащие центральным звеном локальной системы управления. Входные цепи ремиконта рассчитаны на подключение аналоговых и дискретных датчиков, а выходные — формируют аналоговые и дискретные сигналы для управления исполнительными устройствами.
Аналоговая и дискретная информация, поступающая в ремиконт, преобразуется в цифровую форму и обрабатывается в микроЭВМ, после чего возможен процесс обратного преобразования.
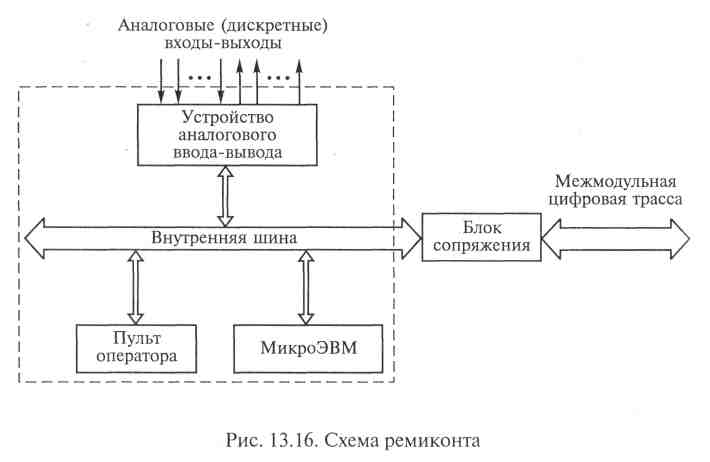
Устройства аналогового ввода-вывода информации микроЭВМ и пульт оператора являются основой аппаратного обеспечения ремиконта (рис. 13.16). Устройства аналогового ввода-вывода содержат узлы гальванического разделения сигналов, узел мультиплексирования аналоговых входных сигналов и группу преобразователей: АЦП, ЦАП, дискретно-цифровой (ДЦП) и цифродискретный (ЦДП).
Узлы гальванического разделения обеспечивают подавление помех общего вида, а также работу с источниками информации, находящимися под различными потенциалами. На выходе ремиконта не используется мультиплексирование, т. е. число ЦАП равно числу выходных цепей контроллера. Такая особенность построения ремиконта связана с необходимостью запоминания значения каждого управляющего сигнала после прекращения вычислительного процесса.
Поскольку в системе управления число выходных сигналов ремиконта невелико, затраты на ЦАП и АЦП оказываются сравнительно небольшими.
Благодаря перечисленным узлам ввода-вывода аналоговой и дискретной информации можно сопрягать ремиконт с аналоговыми и дискретными датчиками, с исполнительными механизмами пропорционального, позиционного, интегрирующего и другого действия, а также с теми или иными устройствами дискретного и логического управления.