

Частотный критерий устойчивости Найквиста
Особенность этого критерия заключается в том, что устойчивость замкнутой системы определяют, используя амплитудно-фазовую частотную характеристику (АФЧХ или АФХ) разомкнутой системы.
Следует отметить, что разомкнутая система практического смысла не имеет. При размыкании связи объекта с регулятором или регулятора с объектом нарушается взаимодействие элементов системы, и объект становится неуправляемым. Однако в методическом плане в ТАУ разомкнутая система используется часто. Передаточная функция разомкнутой САУ имеет вид
![]()
Заменив оператор Лапласа р в передаточных функциях объекта и регулятора на выражение iω, получим аналитическое выражение вектора АФХ разомкнутой системы:
![]()
Разделив вектор АФХ разомкнутой САУ на действительную и мнимую части, строят его годограф, изменяя частоту ω от 0 до ∞.
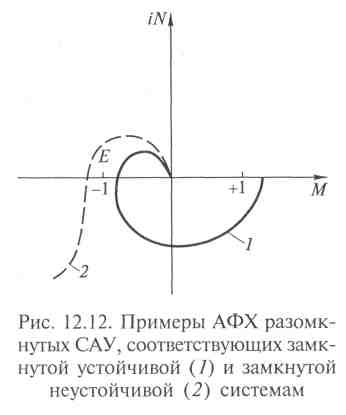
Определение: замкнутая система будет устойчивой, если АФХ разомкнутой САУ на комплексной плоскости не охватывает точку Е с координатами [-1; i0] (рис. 12.12, кривая 1).
Если АФХ разомкнутой системы проходит через точку Е, то замкнутая система теоретически будет на границе устойчивости, а практически она неустойчивая. Чем правее от точки Е АФХ разомкнутой САУ пересекает отрицательную действительную полуось комплексной плоскости, тем большим запасом устойчивости обладает замкнутая система.
Иногда АФХ разомкнутой системы при изменении частоты ω от 0 до ∞ несколько раз пересекает отрицательную действительную полуось комплексной плоскости (рис. 12.13).
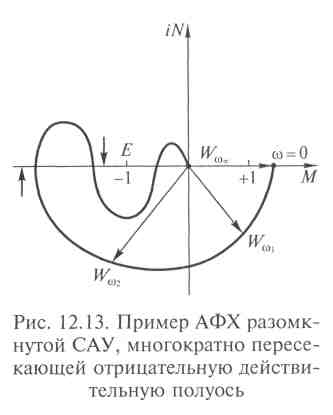
В этом случае замкнутая система будет устойчивой, если число пересечений АФХ разомкнутой САУ отрицательной действительной полуоси левее точки Е [-1; i0] снизу вверх равно числу ее пересечений сверху вниз. На рис. 12.13 АФХ разомкнутой САУ пересекает отрицательную действительную полуось комплексной плоскости левее точки Е один раз снизу вверх и один раз сверху вниз. Следовательно, данная замкнутая САУ устойчивая.
Если проектируемая система устойчивая, можно приступить к анализу качества ее работы.
12.7. Анализ качества работы замкнутой сау
Качество работы САУ легко определить, построив график процесса регулирования, по которому можно найти следующие показатели: статическую и динамическую ошибки, время регулирования и др. (рис. 12.4, 12.5).
В ТАУ разработаны несколько методов построения графика процесса регулирования по известным передаточным функциям всех элементов системы (методы Башкирова, Акульшина, Гольдфарба, Крылова и др.). Есть также методы построения графика процесса регулирования с помощью соответствующих программ.
Солодовниковым В. В. был разработан метод построения графика процесса регулирования замкнутой системы с использованием вещественной части АФЧХ, называемой вещественной характеристикой. Достоинством этого метода, который также называют методом трапеций, является наличие соответствующих расчетных таблиц, т. е. построить этим методом график процесса регулирования для проектируемой САУ можно, используя только калькулятор.
Суть метода трапеций заключается в следующем. Используя передаточные функции объекта и регулятора, записывают передаточную функцию замкнутой системы:
![]()
Заменив в этой
формуле оператор Лапласа р
на выражение
iω,
получают
аналитическое выражение вектора АФХ
замкнутой САУ:
![]()
m(ω) и мнимую in(ω) части, то для АФХ замкнутой системы принимают другие обозначения:

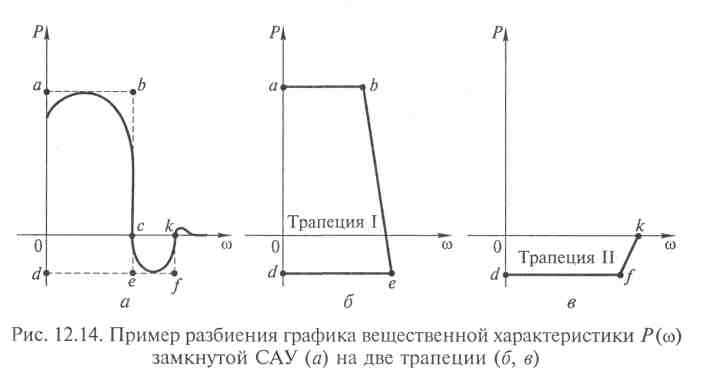
Далее по аналитическому выражению вещественной характеристики САУ Р(ω), изменяя частоту ω от 0 до ∞, строят ее график, который разбивают затем на несколько трапеций с алгебраической суммой площадей, близкой к алгебраической сумме площади, очерченной графиком.
На рис. 12.14 график Р(ω) разбит на две трапеции. (Для большей точности можно разбивать график на 3...5 трапеций.)
На рис. 12.15 с использованием табличных данных рассчитанных для единичной (т.е. с ординатой, равной 1) трапеции и коэффициентов масштабного перехода от единичной трапеции к
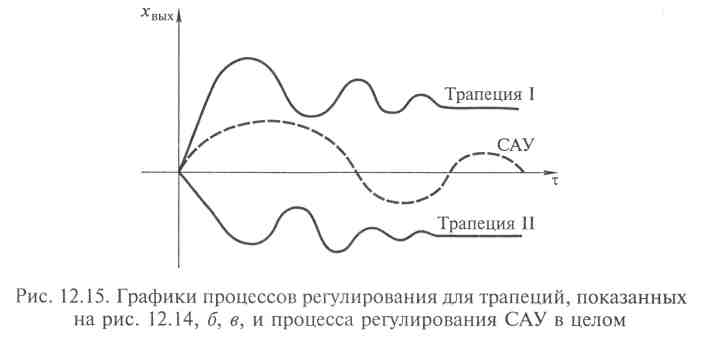
заданным, построены графики процессов регулирования для каждой трапеции в одних осях координат.
Затем, алгебраически суммируя графики процессов регулирования для всех имеющихся трапеций, получают график процесса регулирования для системы в целом, по которому определяют показатели качества работы спроектированной САУ: статическую ошибку, динамическую ошибку, время регулирования и др.
Контрольные вопросы
Каковы графики процессов регулирования в САУ с регуляторами недостаточной, избыточной и необходимой мощности?
При регуляторах какой мощности работа САУ будет устойчивой, неустойчивой и почему?
Что такое статическая ошибка САУ и в каких системах она наблюдается?
Что такое динамическая ошибка САУ?
Что такое время регулирования, перерегулирование и степень затухания в процессе регулирования?
Как определяется обобщенный интегральный средний квадрати-ческий показатель качества процесса регулирования?
Какие на практике используются виды оптимальных процессов регулирования?
Что такое устойчивость САУ и какими показателями она определяется?
Какие существуют критерии устойчивости САУ?
Как определить качество САУ методом трапеций?