

Контрольные вопросы
Каково назначение ЭВМ в составе САУ и какова упрощенная схема цифровой САУ?
Каково назначение АЦП и ЦАП в цифровой САУ?
Как и зачем производится квантование сигналов по времени и уровню в цифровых САУ?
Для чего применяются логические элементы в автоматике?
Какие виды логических операций применяются в автоматике? Что такое дизъюнкция, конъюнкция, логическое умножение, инверсия?
Как осуществляются логические операции релейно-контактными элементами?
Как изображаются логические элементы на схемах?
Какие существуют законы алгебры логики?
Как минимизируются логические функции?
Что представляют собой бесконтактные логические элементы?
Что такое числовое программное управление и каковы преимущества применения СЧПУ в машиностроении?
Что представляют собой позиционное, прямоугольное и контурное управления в СЧПУ?
Поясните функциональную схему СЧПУ токарного станка.
Что такое ГПС и какова ее структурная схема?
15.. Каково назначение и как устроен автоматический робот-манипулятор?
Как работает функциональная схема управления роботом-манипулятором?
Поясните работу системы с центральной управляющей микроЭВМ.
Какова виртуальная структура системы управления с центральной микроЭВМ?
Как работает система с автономными управляющими микроЭВМ (микроконтроллерами)?
В чем заключается принцип действия многомикропроцессорной системы управления?
Какие существуют варианты топологии цифровых систем управления?
Поясните работу типовой одноконтурной системы управления с микроЭВМ.
Глава 14 системы телемеханики
14.1. Основные понятия
В рассмотренных ранее САУ все составляющие их элементы были пространственно сосредоточены, расстояние между ними существенного влияния на работу системы не оказывало и разделить ее на составные части можно было лишь по функциональным признакам.
Иначе обстоит дело, когда управляющее устройство и объект управления расположены достаточно далеко друг от друга. Например, в АСУП расстояние между пунктом управления (ПУ), где сосредоточена аппаратура управления, и контролируемым пунктом (КП), где размещен ОУ, может составлять от десятков метров до десятков километров и более, а в космических системах телеуправления это расстояние достигает тысяч и миллионов километров.
В этих случаях окружающая физическая среда оказывает очень сильное мешающее воздействие на передаваемые между ПУ и КП сигналы. Чтобы снизить влияние помех до допустимого уровня и обеспечить работоспособность таких систем, необходимо согласовать параметры передаваемых сигналов с параметрами среды, по которой они распространяются. Для этого передаваемые сигналы подвергают специальным преобразованиям.
Область науки и техники, охватывающая теорию и технические средства контроля и управления объектами на расстоянии посредством специальных преобразований сигналов, называется телемеханикой.
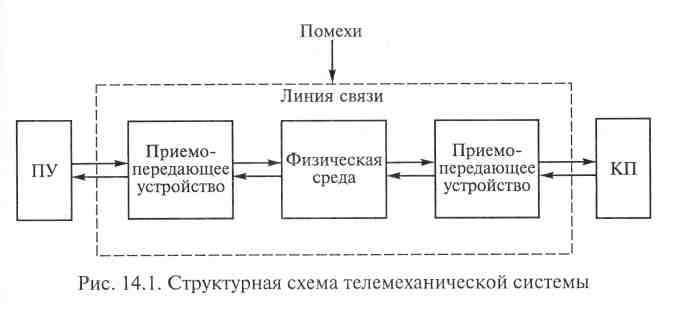
Для осуществления преобразований сигналов используют специальные передающие и приемные устройства. Совокупность приемопередающих устройств и физической среды, обеспечивающая материальное соединение ПУ и КП между собой, образует линию связи (рис. 14.1). Таким образом, принципиальная особенность систем телемеханики заключается в наличии линии связи. Роль линии связи настолько велика, что ее параметры являются определяющими для параметров всей телемеханической системы: точности, быстродействия, дальности действия, надежности и стоимости.
Источниками передаваемой по линии связи информации на КП могут быть различные датчики, машинные носители информации (перфоносители, магнитные носители), передающие телевизионные трубки, различные устройства ручного ввода (кнопки, клавиатура), периферийные ЭВМ, а на ПУ — устройства ручного ввода, расположенные на пульте, с которого осуществляется управление, центральная ЭВМ и машинные носители. Получателями информации на КП могут быть различные исполнительные устройства, периферийные ЭВМ и машинные носители, а на ПУ — устройства индикации различного рода, расположенные на пульте управления, центральная ЭВМ и машинные носители.
Системы телемеханики обеспечивают управление из одного ПУ большим числом КП, расположенных самым различным образом и на самых различных расстояниях. Соответственно могут различаться и соединяющие их линии связи. В зависимости от взаимного расположения ПУ и КП линии связи могут быть с радиальной, цепочечной и древовидной структурами (рис. 14.2).
Современные телемеханические системы обеспечивают взаимодействие в рамках одной большой системы многих сотен и даже тысяч ПУ и КП. В этом случае говорят уже не об отдельных линиях связи, соединяющих ПУ с КП, а о сетях связи. Оптимизация структуры таких сетей связи по времени передачи сигналов, надежности, стоимости и другим параметрам является весьма сложной задачей.
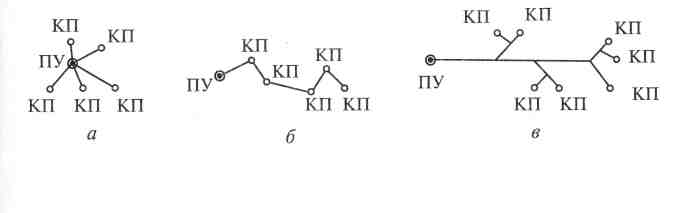
Рис. 14.2. Линии связи радиальной (а), цепочечной {б) и древовидной (в)
структур
В больших телемеханических системах возникает задача передачи сигналов между определенной парой ПУ и КП, т. е. от конкретного источника к конкретному получателю информации. Совокупность технических средств, обеспечивающих независимую передачу сигналов между одним ПУ и одним КП, называется каналом связи. Таким образом, канал включает в себя линию (или сеть) связи и каналообразующую аппаратуру.
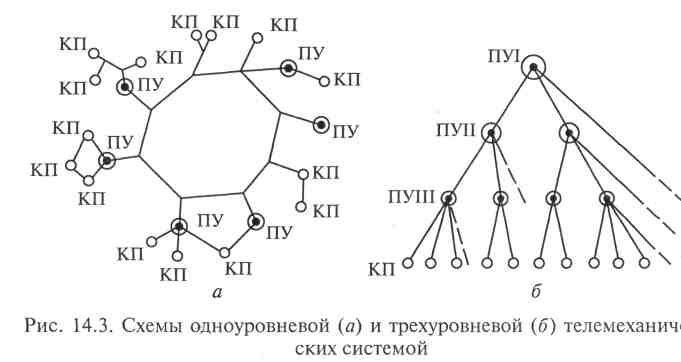
На рис. 14.3, а показан пример одноуровневой, или одноступенчатой, системы, в которой все КП непосредственно связаны с ПУ. Усложнение телемеханических систем, рост объемов передаваемой и перерабатываемой информации приводят к тому, что зачастую более эффективными оказываются многоуровневые системы, построенные по иерархическому принципу (рис. 14.3, б). В иерархических системах информация отбирается, частично обрабатывается и обобщается на каждом промежуточном уровне при передаче ее от КП к ПУ и, наоборот, конкретизируется и уточняется на каждом уровне при передаче от ПУ к КП. При этом в современных телемеханических системах каждый КП сам представляет собой весьма сложную местную систему централизованного контроля. Иерархический принцип построения широко используется в АСУ.
В зависимости от выполняемых функций телемеханические системы принято делить на системы телеизмерения, телесигнализации, телеуправления и телерегулирования.
Системы телесигнализации (ТС) служат для получения с помощью устройств телемеханики информации о дискретных состояниях контролируемых объектов (например, включен или выключен исполнительный двигатель, укладываются ли размеры детали в заданные приделы и т.д.).
Задачей систем телеуправления (ТУ) является передача от ПУ к КП управляющих воздействий — команд. В системах ТУ могут передаваться как простейшие двухпозиционные команды (типа включить-выключить), так и многопозиционные (типа повернуть антенну радиолокационной станции на нужный угол или включить двигатели космического корабля на заданное время). Пункты управления систем ТУ могут выдавать команды как непосредственно на исполнительные органы контролируемых объектов, так и записывать их в запоминающие устройства для последующего выполнения.
Во многих случаях на КП имеются местные САУ, поддерживающие необходимый режим работы контролируемого объекта (например, угол поворота рулей, требуемые давление или температуру и пр.). При этом с ПУ эпизодически передаются лишь заданные значения управляемых параметров — так называемые установки, а в остальное время местные САУ работают автономно. Такая функция систем телемеханики называется телерегулированием (ТР).
В настоящее время не применяются системы телемеханики, выполняющие какую-либо одну из перечисленных функций: ТИ, ТС, ТУ или ТР. Практически все современные телемеханические системы являются многофункциональными, или комплексными, системами. Так, например, на основании измерения параметров ориентации космического корабля по системе ТС для реализации всех этих функций используется общее оборудование, т.е. одна система выполняет функции ТИ, ТУ, ТС.
Независимо от конкретных выполняемых функций все телемеханические системы всегда являются системами передачи информации, главная задача которых — передать информацию на необходимое расстояние с минимальными затратами (часто и за минимальное время). В этом плане системы телемеханики все теснее смыкаются с чисто информационными системами передачи данных (СПД). Специфическими особенностями систем телемеханики по сравнению с СПД остаются меньший объем передаваемой информации, но значительно большая ее достоверность. Так, в системах ТУ вероятность возникновения ложной команды не должна превышать 10 -7... 10 -13, а в системах ТИ допустимая погрешность составляет не более 1 ...0,05%.
Основные тенденции развития систем телемеханики — расширение возможностей систем по управлению контролируемыми объектами, увеличение числа ПУ и КП и рост объемов передаваемой информации наряду с повышением требований к их надежности и точности. Для решения этих задач в системах телемеханики все более широкое применение находят ЭВМ различных классов и производительности. В качестве ПУ используют универсальные ЭВМ с соответствующими приемопередающими устройствами, пультами управления и устройствами индикации. Применение встроенных микропроцессоров и микроЭВМ на КП позволяет производить предварительную обработку и отбор информации, что повышает оперативность и гибкость управления и разгружает каналы связи.
Широкое применение ЭВМ приводит к тому, что, как и в САУ, задачей телемеханики становится не разработка соответствующей аппаратуры, а поиск алгоритмов оптимального управления объектами.