Контрольные вопросы
Что представляют собой статический и динамический режимы работы объекта и какие существуют типовые возмущающие воздействия?
Какие реальные физические объекты можно представить апериодическим звеном? Что такое передаточная функция апериодического звена?
Что представляют собой АФХ и типовая кривая разгона апериодическое звена?
Какие объекты можно представить как интегрирующее (астатическое) звено? Какова передаточная функция такого звена?
Что представляют собой АФХ и типовая кривая разгона интегрирующего звена?
6.Приведите примеры реализации колебательного и апериодического 2-го порядка звеньев. Какова передаточная функция колебательного звена?
Что представляет собой АФХ колебательного звена?
Что представляют собой типовые кривые разгона колебательного и апериодического 2-го порядка звеньев?
Приведите примеры реализации пропорционального звена. Каковы АФХ и типовая кривая разгона этого звена?
Приведите пример идеального дифференцирующего звена. Какова его передаточная функция?
Поясните АФХ и кривые разгона идеального и реального дифференцирующих звеньев?
Приведите пример реализации и поясните АФХ и типовую кривую разгона запаздывающего звена.
Что представляют собой логарифмические частотные характеристики динамических звеньев?
Поясните ЛАХ и ЛФХ безинерционного и апериодического звеньев?
Каковы ЛАХ и ЛФХ колебательного звена и какие факторы влияют на изменение этих характеристик?
Поясните ЛАХ и ЛФХ дифференцирующего и интегрирующего звеньев.
Глава 10 соединение звеньев в сау
10.1. Типовые соединения звеньев
В реальных промышленных САУ соединение элементов между собой может быть довольно сложным. Однако любую сложную схему можно разбить на отдельные блоки с одним из трех типовых соединений: последовательным, параллельно-согласованным или параллельно-встречным.
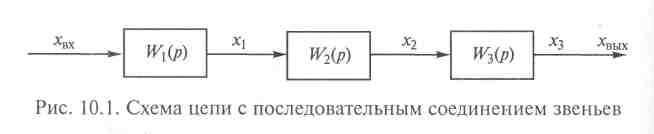
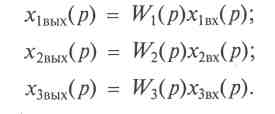
Последовательное соединение звеньев
![]()
![]()
![]()
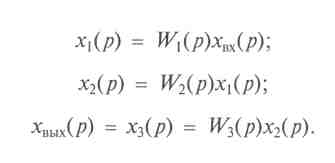
Последовательно подставляя в последнее уравнение выражения входных сигналов, получим
![]()
т. е. передаточная функция цепи последовательно соединенных звеньев будет иметь вид
![]()
Чтобы получить выходной сигнал цепи, нужно произведение передаточных функций ее звеньев умножить на входной сигнал. Если вместо передаточной функции использовать дифференциальные уравнения, придется каждое из них решать отдельно, получая при этом, как правило, не общее, а только частное для заданных условий решение.
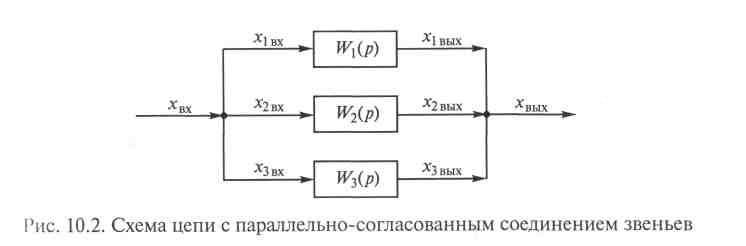
Параллельно-согласованное соединение звеньев
Схема параллельно-согласованного соединения звеньев приведена на рис. 10.2.
Для этого типового соединения принимается, что входной сигнал цепи обладает достаточной мощностью, т.е. не уменьшается при разделении его на параллельные ветви, а выходной сигнал равен сумме выходных сигналов всех звеньев:
![]()
![]()
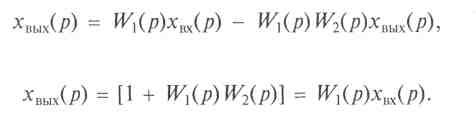
Взяв отношение выходного сигнала цепи к входному, получим передаточную функцию цепи параллельно-согласованных звеньев:
![]()
Опять мы убедились в том, что передаточная функция как форма записи математической модели звена или элемента очень удобна при проектировании промышленных САУ.
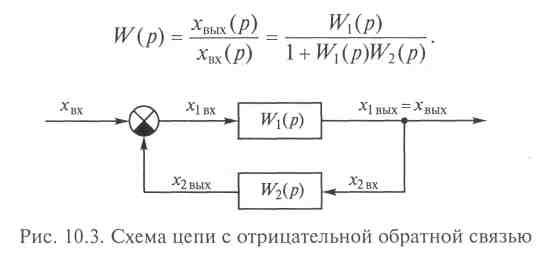
Параллельно-встречное соединение звеньев
Схема цепи с отрицательной обратной связью приведена на рис. 10.3.
Из этой схемы очевидно, что х1вых = хвых = х2вх.
При введении отрицательной обратной связи х1вх = хвх - х2вых.
Тогда можно записать:
![]()
Раскрыв квадратные скобки, получим
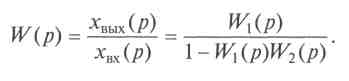
Таким образом, передаточная функция цепи с параллельно-встречным соединением звеньев с отрицательной обратной связью будет иметь вид
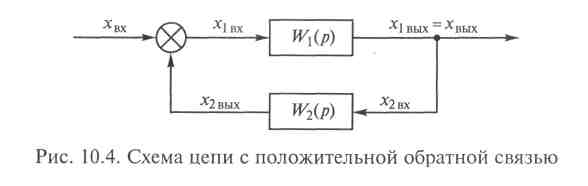
На рис. 10.4 дана схема соединения двух звеньев с положительной обратной связью.
При положительной обратной связи х1вх = хвх + х2вых.
Используя предыдущие рассуждения, получим следующую передаточную функцию цепи с параллельно-встречным соединением звеньев с положительной обратной связью: