

Индукционные датчики
Действие индукционного датчика основано на изменении индуктивных связей между его обмотками при смещении подвижных элементов магнитопровода. Существует много разновидностей таких датчиков, но наиболее распространен дифференциальный трансформаторный датчик (рис. 4.3). На полюсных выступах неподвижной части магнитопровода 1 такого датчика расположены 1)0мотка возбуждения 3 и сигнальные обмотки 2 и 4, с которых м и мается выходное напряжение. Измеряемое перемещение воздействует на подвижную часть магнитопровода 5.
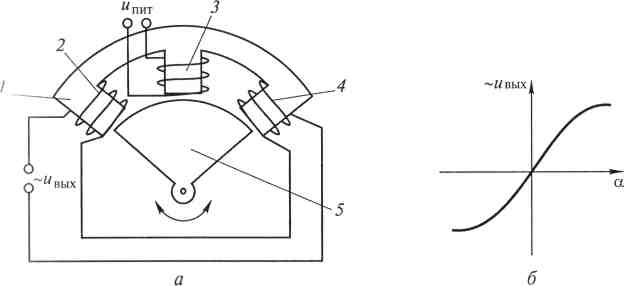
Рис.. 4.3. Схема конструкции (а) и статическая характеристика (б) индукционного трансформаторного датчика:
неподвижная часть магнитопровода; 2, 4 — сигнальные обмотки; 3 — обмотка возбуждения; 5 — подвижная часть магнитопровода
Когда магнитопровод находится в среднем положении, магнитный поток, создаваемый катушкой 3, наводит в обмотках 2 и 4 равные ЭДС; поскольку эти катушки соединены встречно, на (1,1 ходе датчика сигнала в этом случае нет. При смещении подвижной части магнитопровода ЭДС в одной из сигнальных катушек увеличивается, а в другой — уменьшается, и на выходе появляется сигнал, равный разности этих ЭДС.
Емкостные датчики
Принцип действия емкостного датчика состоит в преобразовании перемещения в изменение емкости С.
Емкостные датчики бывают простые и дифференциальные.
На рис. 4.4 представлены схемы конструкций некоторых емкостных датчиков. Емкость в таких датчиках может изменяться в результате изменения расстояния между пластинами (см. рис. 4.4, а, б), площади взаимного перекрытия пластин (см. рис. 4.4, в), а также и за счет изменения диэлектрических свойств изолирующего промежутка.
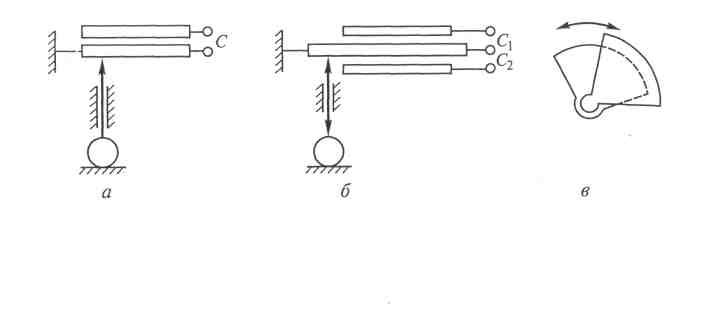
Рис. 4.4. Схемы конструкций емкостных датчиков:
а, б — соответственно простого и дифференциального с переменным расстоянием между пластинами; в — с переменной площадью взаимоперекрытия пластин
Емкостные датчики питаются переменным током высокой частоты. Они очень чувствительны, а следовательно, в большой степени подвержены влиянию различных помех (наводок, действию внешних емкостей, отклонениям питающего напряжения и др.), поэтому применяются преимущественно как датчики релейного типа.
Фотоэлектрические датчики
Действие фотоэлектрического датчика основано на преобразовании изменения светового потока в изменение электрических параметров фотоэлемента.
Фотоэлементы — это особый вид полупроводников или электронных приборов (газонаполненные элементы).
Для измерения перемещений обычно используются фоторезисторы,
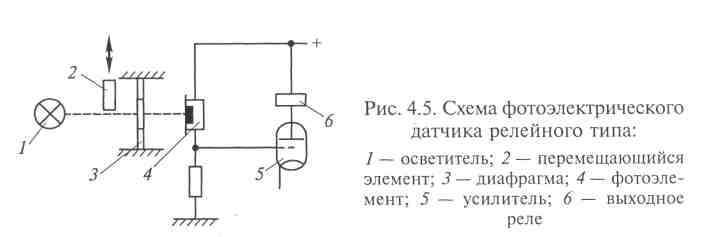
Работают фотоэлектрические датчики следующим образом. Измеряемое перемещение вызывает перекрытие светового потока, освещающего фотоэлемент. Изменение электрических параметров воспринимается электрической схемой, обычно усилителем.
Эти датчики широко применяются в промышленности не только для измерения перемещений, но и для контроля чистоты поверхности, наличия дефектов поверхности, счета деталей на конвейерах и т. п.
Существует группа фотоэлектрических импульсных датчиков, которые работают в комплексе со счетными устройствами. Такой комплекс позволяет измерять большие перемещения (как угловые, так и линейные) с высокой точностью. Высокая (в сравнении с другими видами датчиков) точность достигается за счет увеличения масштаба измеряемого перемещения при его учете.
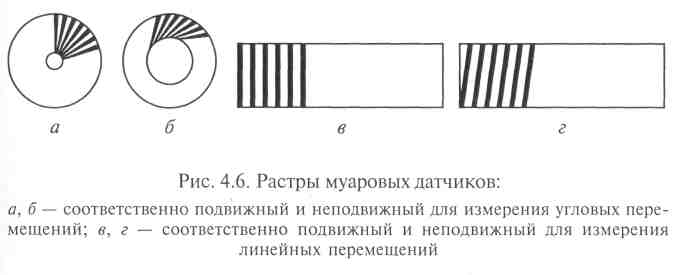
Примером может служить муаровый растровый датчик, представляющий собой комбинацию двух растров — подвижного и неподвижного (рис. 4.6). Растры — это решетки из прозрачных и непрозрачных полос, форма которых может быть различной. На рис. 4.6, а, б представлены радиальные центральный и нецентральный растры, сопряжение которых применяется при измерении угловых перемещений, а на рис. 4.6, в, г — растровые решетки, сопряжение которых используется при измерении линейных перемещений.
Растровое сопряжение устанавливается на пути светового потока таким образом, чтобы он проходил перпендикулярно к обоим растрам.
При перемещении подвижного растра относительно неподвижного образуются комбинационные муаровые полосы, движущиеся перпендикулярно к измеряемому перемещению. Эти полосы пересекают световой поток, модулируют его, и фотодатчик формирует импульсы. Выходной сигнал измерительной схемы имеет цифровую форму — это число импульсов, учтенных счетчиком.