

9.5. Пропорциональное (усилительное, безынерционное) звено
![]()
Передаточная функция пропорционального звена имеет вид
![]()
Аналитическое выражение вектора АФХ этого звена
![]()
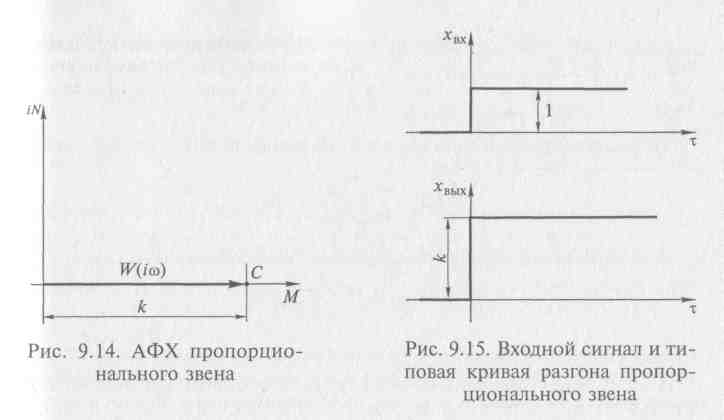
Поскольку АФХ пропорционального звена не зависит от изменения частоты со, годограф ее вектора (рис. 9.14) превращается в точку С, находящуюся на действительной положительной полуоси комплексной плоскости на расстоянии к от начала координат.
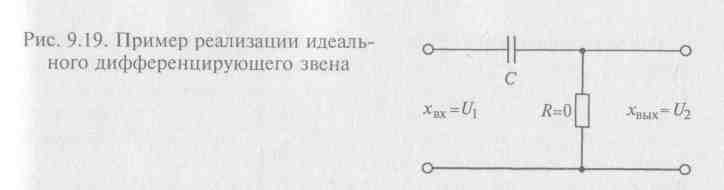
Пропорциональное звено мгновенно (без инерции) реагирует на возмущающее воздействие. По типовой кривой разгона, показанной на рис. 9.15, видно, что выходной сигнал этого звена пропорционален входному сигналу, и ордината выходного сигнала равна коэффициенту пропорциональности к.

Примером реализации пропорционального звена может служить жесткий стержень, лежащий на опоре (рис. 9.16), при перемещении одного конца которого (хвх) мгновенно перемещается другой его конец (хвых).
9.6. Дифференцирующее звено
Различают идеальное дифференцирующее и реальное дифференцирующее ТДЗ.
Сначала рассмотрим идеальное дифференцирующее звено, типовое дифференциальное уравнение которого имеет вид
![]()
![]()
Передаточная
функция идеального дифференцирующего
звена
![]()
Аналитическое
выражение вектора АФХ такого звена
![]()
Изменяя частоту со от 0 до ∞ в последнем выражении, легко построить график вектора АФХ идеального дифференцирующего звена (рис. 9.17). Конец вектора АФХ идеального дифференцирующего звена перемещается из начала координат по положительной мнимой полуоси комплексной плоскости, уходя при ω = ∞ в бесконечность.
Типовая кривая разгона идеального дифференцирующего звена своеобразна (рис. 9.18). Выходной сигнал этого звена пропорционален первой производной входного сигнала, т. е. тангенсу угла наклона вектора АФХ. В момент подачи входного воздействия этот угол равен +90°, а tg(+90°) = +∞, но далее входное воздействие устанавливается равным единице, при этом угол наклона становится равным -90°, а tg(-90°) = -∞.
Следовательно, выходной сигнал идеального дифференцирующего звена в момент подачи входного воздействия принимает

значение +∞. Тут же из +∞ вычитается -∞ и выходной сигнал возвращается в исходное нулевое состояние (см. рис. 9.18).
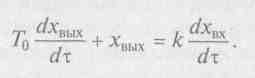
Примером реализации идеального дифференцирующего звена может быть электрическая цепь, состоящая из конденсатора с емкостью С и резистора R, обладающего сверхпроводимостью (R = 0). Схема такой RС-цепи изображена на рис. 9.19.
![]()
В этом алгебраическом уравнении хвых(р) можно вынести за скобки:
![]()
а затем получить аналитическое выражение передаточной функции реального дифференцирующего звена:
![]()
Заменив р на iω в передаточной функции, получим аналитическое выражение вектора АФХ данного звена:

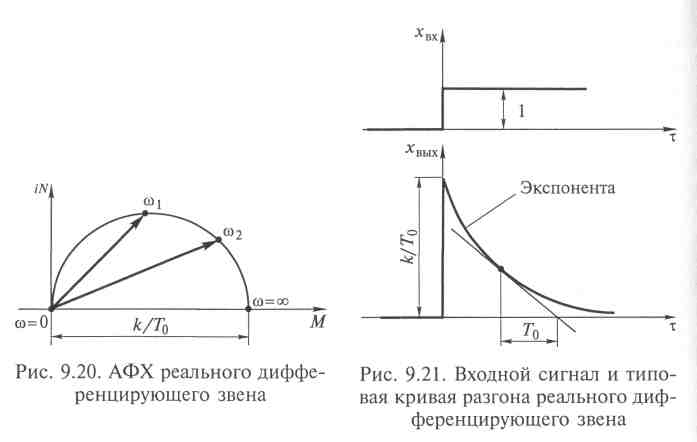
После проведенных алгебраических преобразований, изменяя частоту ω от 0 до ∞ в действительной m(ω) и мнимой in(ω) частях вектора АФХ, легко построить годограф реального дифференцирующего звена (рис. 9.20).
При ω = ∞ единицу
в знаменателе m(ω)
можно
отбросить. Тогда, сократив дробь
получим m(ω)
= k/T0.
![]()
Cледовательно, графиком вектора АФХ этого звена является полуокружность в первом квадранте комплексной плоскости, диаметр которой равен k/Т0.
Типовая кривая разгона реального дифференцирующего звена, изображенная на рис. 9.21, показывает, что после подачи на его вход возмущения в виде единичного скачка выходной сигнал мгновенно увеличивается на величину k/Т0, а затем по экспоненте постепенно приближается к нулю. Таким образом по кривой разгона легко определить коэффициенты Т0 и к передаточной функции звена, т. е. сначала с помощью касательной (см. описание апериодического ТДЗ) находят значение Т0, а затем, умножив ординату величины к/Т0 на Г0, получают значение k.
Примером реализации реального дифференцирующего звена будет RС-цепь, показанная на рис. 9.19, в которой сопротивление R ≠ 0, что реально имеет место.