

14.4. Методы преобразования сигналов
Электрические сигналы, подлежащие передаче в системах телемеханики, в большинстве случаев лежат в низкочастотной части спектра (в диапазоне от нуля до нескольких десятков герц). Непосредственная передача этих сигналов между ПУ и КП иногда используется в так называемых системах интенсивности, но дальность действия подобных систем ограничена и редко превышает несколько десятков метров, так как низкочастотные сигналы наиболее сильно подвержены воздействию помех при передаче их на большие расстояния. Так как полоса пропускания воздушных линий связи обычно начинается от 0,5 кГц, для согласования низкочастотного сигнала с высокочастотной линией связи производят перенос спектра передаваемого сигнала в высокочастотную область.
Для этого низкочастотный сигнал приводят в однозначное соответствие с одним из параметров высокочастотного колебания, называемого несущим. Такое преобразование спектра называют модуляцией, а устройство, осуществляющее модуляцию, — модулятором. Существуют непрерывные, импульсные и цифровые методы модуляции.
Непрерывные методы модуляции
В непрерывных методах модуляции в качестве несущего используют непрерывное гармоническое колебание, вырабатываемое высокочастотным генератором. В зависимости от того, какой именно параметр несущего колебания изменяется в соответствии с изменением низкочастотного сигнала, различают модуляции амплитудную (АМ), частотную (ЧМ) и фазовую (ФМ).
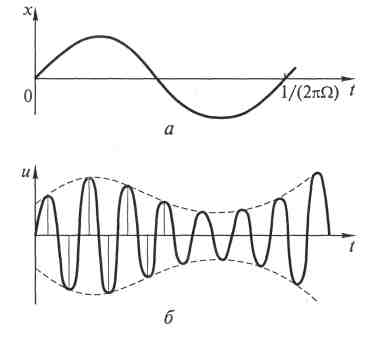
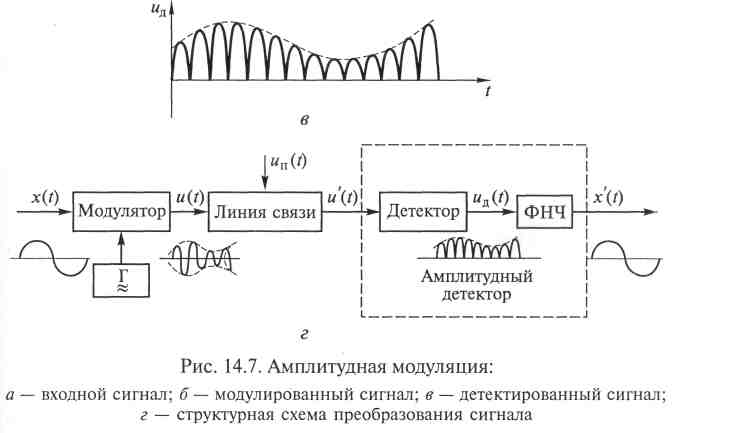
Рассмотрим амплитудную модуляцию (рис. 14.7). Пусть имеются модулирующий входной сигнал х(t) = ХсоsΩt (см. рис. 14.7, а) и несущее гармоническое колебание и(t) = U0соsω0t (см. рис. 14.7, а), причем несущая частота со0 значительно больше частоты входного сигнала С1, а начальные фазы х(t) и и(t) примем равными нулю. В результате модуляции амплитуда несущего колебания становится связанной с модулирующим сигналом следующим образом:
и(t) = U0 + кХсоsΩt = U0(1 + mсоsΩt),
где
U0
—
амплитуда несущего сигнала; X
—
амплитуда входного сигнала;![]() —
коэффициент модуляции.
—
коэффициент модуляции.
Тогда выражение для модулированного сигнала будет иметь вид
![]()
Раскрыв скобки, по теореме произведения косинусов получим
![]()
т.е. модулированный сигнал состоит из трех составляющих с частотами
![]() и
соответственно с амплитудами U0
и
и
соответственно с амплитудами U0
и
![]() .
Следовательно,
полоса пропускания линии связи должна
быть для такого сигнала не менее 2Ω.
.
Следовательно,
полоса пропускания линии связи должна
быть для такого сигнала не менее 2Ω.
Если входной сигнал х(t) является периодическим с частотой Ω, но имеет сложную форму, то его согласно преобразованию Фурье можно представить в виде суммы составляющих гармоник с частотами Ω, 2Ω, ЗΩ и т.д. Соответственно в спектре модулированного сигнала появятся составляющие с частотами ω0 ± 2Ω, ω0 ± 3Ω и т.д. При импульсных и непериодических входных сигналах этот ряд оказывается бесконечным, но мощность высших гармонических составляющих очень мала, и практически спектр модулированного сигнала можно считать ограниченным.
Таким образом, независимо от формы сигнала х(t) в результате модуляции происходит перенос его спектра из низкочастотной области в высокочастотную: с частоты Ω на частоту ω0 ± Ω. Частота высокочастотного колебания ω0 выбирается в зависимости от вида и полосы пропускания линии связи. Само по себе модулированное колебание информации не несет, поэтому при приеме производят его обратное преобразование, выделяя исходный низкочастотный сигнал. Такое преобразование называется демодуляцией, а соответствующее устройство демодулятором.
Для демодуляции АМ-колебаний сигнал и(t) пропускают через амплитудный детектор, в качестве которого используют одно- или двухполупериодный выпрямитель. В результате получают демодули-рованный сигнал иД(t), форма которого (для двухполупериодного выпрямителя) показана на рис. 14,7, в. В этом сигнале присутствует исходная составляющая с частотой Ω, для выделения которой используют фильтр низких частот (ФНЧ) с соответствующей АЧХ.
Существенным недостатком метода амплитудной модуляции является его низкая помехоустойчивость. Это происходит потому, что сигнал помехи иП(t) с частотой Ωп, всегда присутствующий в линии связи, складываясь с полезным сигналом u(t), изменяет прежде всего его амплитуду. А так как амплитуда АМ-колебания является информативным параметром, то после демодуляции выделенный сигнал х'(t) (см. рис. 14.7, г) заметно отличается от переданного сигнала х(t).
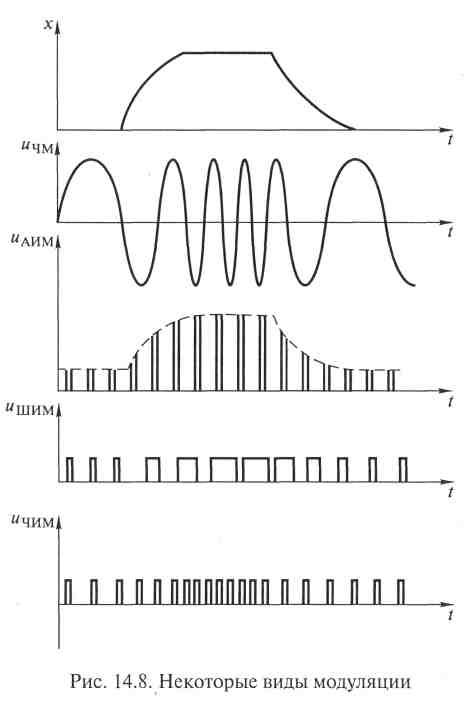
При частотной модуляции частота несущего колебания изменяется в соответствии с информационным сигналом х(t) (рис. 14.8):
![]()
где Δω — девиация частоты.
При фазовой модуляции изменяется фаза несущего колебания в соответствии с информационным сигналом:
![]()
где Δφ — девиация фазы.
При частотном и фазовом методах модуляции требуется более широкая полоса пропускания линии связи, чем при амплитудном, но зато они значительно более помехоустойчивы.
Для того чтобы обеспечить двустороннюю передачу сигналов, на каждом конце линии связи должны быть и модулятор, и демодулятор. В совокупности такое устройство называют модем. В системах передачи данных модем является основной частью устройства преобразования сигналов (УПС).