

11.3. Классификация регуляторов по реализуемому закону регулирования
где К — коэффициент усиления.
![]()
Коэффициенты, входящие в передаточные функции регуляторов, называются их параметрами настройки. В конструкциях регуляторов закладывается возможность изменения значений этих коэффициентов в широком диапазоне.
В некоторых конструкциях П-регулятора коэффициент К может изменяться в диапазоне от 0,1 до 40.
Интегральный (астатический), или И-регулятор с одним параметром настройки. Его передаточная функция совпадает с передаточной функцией астатического (интегрирующего) ТДЗ:
![]()
где Ти — время интегрирования.
В некоторых конструкциях И-регулятора параметр настройки ТИ может изменяться в диапазоне от 1 до 2000 с.
Пропорционально-интегральный, или ПИ-регулятор с двумя параметрами настройки. Это один из наиболее часто используемых в промышленных САУ типов регуляторов. Его передаточная функция следующая:

Параметрами настройки регуляторов этого типа являются коэффициент усиления К и время интегрирования ТИ. Передаточная функция ПИ-регулятора включает в себя сумму его пропорциональной и интегральной составляющих, что соответствует параллельно-согласованному соединению элементов или звеньев, заложенному в структуре ПИ-регулятора. Следовательно, в случае I отказа интегральной составляющей ПИ-регулятор будет работать I как П-регулятор, что повышает надежность его работы.
Пропорционально-дифференциальный, или ПД-регулятор с двумя параметрами настройки. Его передаточная функция имеет вид
![]()
где Тд — время дифференцирования.
В некоторых конструкциях ПД-регулятора параметр настройки Тд изменяется в диапазоне от 1 до 200 с.
Пропорционально-интегрально-дифференциальный, или ПИД-регулятор с тремя параметрами настройки. Его передаточная функция имеет вид
![]()
Выбор типа регулятора или закона регулирования для конкретного объекта управления — задача не из простых. Этот выбор определяется несколькими факторами: видом передаточной функции объекта; отношением общего времени его запаздывания к постоянной времени Т0 (если статический объект с запаздыванием) или к Т (если астатический объект с запаздыванием), а также требованиями к качеству работы проектируемой САУ. Существует ряд диаграмм и эмпирических формул, позволяющих по передаточной функции объекта определить необходимый тип регулятора и его оптимальные параметры настройки.
Однако на практике часто используется метод проб и ошибок. Сначала предварительно выбирают тип регулятора и задают его параметры настройки, затем проверяют САУ на устойчивость и качество работы и, если полученные показатели не удовлетворяют заданным требованиям к проектируемой САУ, все начинают сначала, т.е. выбирают более сложный тип регулятора и т.д.
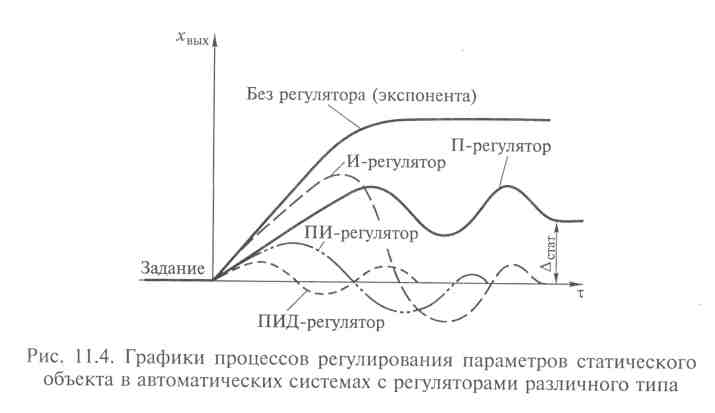
Что дает применение различных типов регуляторов иллюстрирует рис. 11.4, где приведены графики процессов регулирования параметров статического объекта (апериодического ТДЗ) в системах с П-, И-, ПИ- и ПИД-регуляторами.
Статический объект обладает свойством самовыравнивания, поэтому его регулируемый параметр без регулятора с течением времени по экспоненте приходит к постоянному значению. В САУ с П-регулятором имеется статическая ошибка, а в САУ с ПИД-регулятором (самым сложным и дорогим) — минимальные динамическая ошибка и время регулирования (см. рис. 11.4).