

13.4. Промышленные роботы
Роботом называется автоматическая машина, выполняющая физическую работу вместо человека. Область применения роботов весьма обширна. Исследование космоса и глубин мирового океана, сельское хозяйство, транспорт и промышленное производство, строительство — везде существует настоятельная необходимость в подобных автоматах. Роботы могут заменить человека при работе в опасных для жизни и здоровья условиях, освободить его от монотонных, утомительных, неприятных работ. Наибольшее развитие в настоящее время получили промышленные роботы, являющиеся важнейшей составляющей комплексной автоматизации производственных процессов. От традиционных средств автоматизации промышленные роботы отличаются универсальностью воспроизводимых движений и возможностью быстрой их переналадки на новые операции, а также возможностью объединения в комплексы вместе с технологическим оборудованием.
Роботы в основном применяются в машиностроении для замены рабочих, занятых обслуживанием металлорежущих станков, прессов, печей и другого технологического оборудования, а также для выполнения таких основных технологических операций, как сварка, простейшая сборка, транспортировка и т.д. Применение промышленных роботов позволяет не только комплексно автоматизировать работу отдельных станков, но и перейти к автоматизации отдельных участков, например механической обработки, штамповки, точечной сварки, путем создания робототехнических комплексов. Такие комплексы являются обязательной составной частью ГПС — систем высшего (достижимого для современной техники) уровня автоматизации производства.
Основная задача, выполняемая промышленными роботами, — манипуляционные действия в производственном процессе.
Манипуляционные действия — это перемещение и ориентирование в пространстве предметов (заготовок, готовых деталей) и орудий труда (инструментов). Исходя из основной задачи промышленного робота, его можно определить как совокупность механических рук — манипуляторов и управляющего устройства. В общем случае робот может иметь и средства передвижения.
Наиболее простые роботы, основная задача которых — выполнение определенных движений (манипуляций), заданных программой, называются автоматическими манипуляторами. В зависимости от сложности выполняемой работы различают автоматические роботы-манипуляторы трех видов — трех поколений.
Роботы-манипуляторы первого поколения работают по жесткой программе, а их взаимодействие с окружающей средой ограничено элементарными обратными связями. Роботы первого поколения могут быть очувствленными, т.е. иметь сенсорные датчики (в частности, датчики осязания — тактильные, позволяющие регулировать силу сжатия захвата). Среда, в которой действуют такие роботы, должна быть определенным образом организована. Это значит, что все предметы (заготовки и готовые детали, инструмент, элементы конструкции, станков, оборудования и т.д.) должны находиться в определенных местах и иметь определенную ориентацию в пространстве. Данное требование накладывает некоторые ограничения на применение роботов-манипуляторов первого поколения.
Роботы-манипуляторы второго поколения обладают элементами адаптации к окружающим условиям и способны решать более сложные задачи. Это очувствленные роботы, имеющие сенсорные датчики, которые позволяют им координировать движения по воспринимаемым сигналам о состоянии окружающей среды. В частности, это могут быть тактильные датчики, позволяющие менять развиваемое усилие, локационные датчики (световые, ультразвуковые, телевизионные, гамма-лучевые и т.п.), позволяющие изменять траекторию движения манипулятора при появлении препятствия, необходимости совмещения деталей, нечетко ориентированных в пространстве, и т.п.
Роботы-манипуляторы третьего поколения способны логически обрабатывать поступающую информацию, т.е. имеют искусственный интеллект. Эти роботы способны к обучению и адаптации, могут вести диалог с человеком-оператором, распознавать и анализировать сложные ситуации, формировать понятия и создавать модель окружающей среды, планировать поведение в виде программы действий (с учетом предыдущего опыта) и т.д. Осу работу по такому сложному алгоритму можно только с применением ЭВМ.
Основу парка в промышленности составляют в настоящее время роботы первого поколения как наиболее простые, надежные и экономичные.
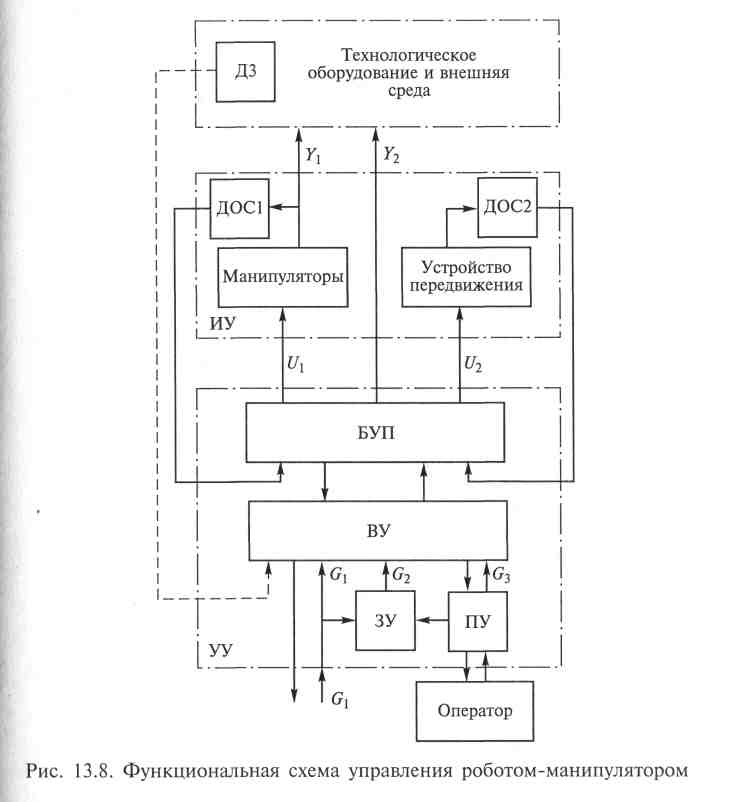
На рис. 13.7 схематично показано устройство автоматического робота-манипулятора, а на рис. 13.8 приведена функциональная схема его управления. Конструктивно такой робот состоит из двух основных частей: исполнительной, включающей в себя манипулятор, или манипуляторы (М) и устройство передвижения (УП), и управляющей, т. е. устройства управления робота (УУ).
Манипулятор робота имеет горизонтальную руку 3, которая может перемещаться как в горизонтальном (по оси х), так и вертикальном (по оси т) направлениях относительно стойки 2. При этом стойка может поворачиваться на угол а вокруг вертикальной оси 2 относительно неподвижного основания 1. На конце руки закреплен механизм кисти 4, обеспечивающий дополнительно две степени свободы захвату 5: поворот вокруг продольной оси руки на угол р и поворот (качание) относительно перпендикулярной оси у на угол у. Для фиксирования детали захват 5 может автоматически закрываться (движение по стрелке А).
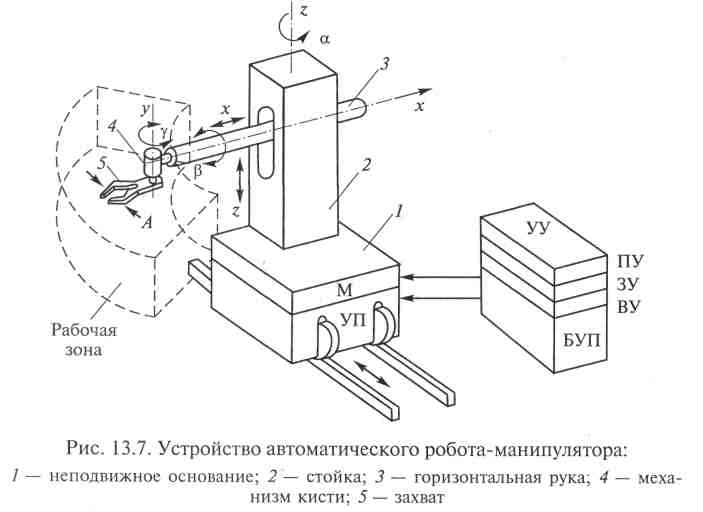
(прямоугольная, цилиндрическая, сферическая, комбинированная) для осуществления переносного движения рабочего органа (движения собственно руки манипулятора) рабочая зона манипулятора может иметь вид параллелепипеда, цилиндра, шара и более сложных пространственных тел. Так как рука манипулятора, показанного на рис. 13.7, имеет одну вращательную и две поступательные степени свободы (подвижности): движение вдоль осей х и у и поворот вокруг оси 2, его рабочая зона имеет вид цилиндра. Движение кисти — поворот вокруг оси х и качание вокруг оси у являются ориентирующими. Автоматические роботы-манипуляторы могут иметь от трех до семи степеней подвижности, а устройство их рабочего органа зависит от назначения робота.
В роботах, выполняющих погрузочно-разгрузочные операции, транспортировку, смену инструмента, используют и различные виды захватов, обеспечивающие взятие, ориентирование и удержание объекта манипулирования. В роботах, выполняющих технологические операции, рабочим органом может быть пульверизатор, сварочная головка, гайковерт или другой инструмент.
Принципы действия и конструкции захватов весьма разнообразны, так как размеры, форма и физико-химические свойства объектов манипулирования могут изменяться в широких пределах. По способу захвата и удержания объекта манипулирования захватные устройства делятся на механические, вакуумные, электромагнитные и комбинированные.
Исполнительные устройства манипулятора приводятся в действие двигателями, число которых зависит от числа степеней его подвижности. Существуют манипуляторы, имеющие один двигатель на несколько степеней подвижности, снабженный муфтами для распределения движения. Вид двигателя привода зависит от назначения манипулятора и его параметров. В настоящее время примерно в равной степени используются пневматические, гидравлические и электрические двигатели.
Подвижные роботы могут иметь различные устройства передвижения — от давно известных устройств качения до шагающих механизмов (педипуляторов), разрабатываемых в последнее время.
Устройство управления роботом-манипулятором может выполняться в виде самостоятельного (конструктивно обособленного) блока или быть встроенным в корпус его исполнительной части. Обычно в состав устройства управления (см. рис. 13.8) входят: пульт управления (ПУ), позволяющий производить ввод и контроль задания; запоминающее устройство (ЗУ), хранящее программу работы; следящий привод механизмов манипулятора и устройства передвижения; усилители; преобразователи; источники питания; управляющие элементы (реле, контакторы, золотники, струйные трубки, распределители движения, электромагнитные клапаны и т.д.).
Число датчиков обратной связи в схеме управления (ДОС1, ДОС2) определяется числом степеней подвижности манипулятора и числом координат перемещения его исполнительного устройства. Используются они в следящем приводе для контроля перемещения рабочего органа манипулятора и в целом всего его исполнительного устройства (ИУ).
В качестве датчиков обратной связи по перемещению в роботах-манипуляторах применяют потенциометры, сельсины, вращающиеся трансформаторы, индуктосины, кодирующие преобразователи и т. п.
В очувствленных и адаптивных роботах могут быть сенсорные датчики для получения дополнительной информации о фактической обстановке в зоне действия их манипуляторов. В качестве сенсорных датчиков, входящих в систему очувствления, кроме тактильных и локационных в роботах-манипуляторах могут использоваться и любые другие датчики: температуры, давления, магнитного поля, цвета и т.д. Информация сенсорных датчиков вводится в вычислительное устройство (ВУ) для корректировки действия робота.
Манипулятор робота создает основное рабочее воздействие Ух на технологическое оборудование или объект манипулирования (заготовку, деталь, инструмент). Кроме того, на технологическое оборудование могут подаваться управляющие воздействия (U1, U2) и технологические команды У2 непосредственно от блока управления процессом (БУП) — на блокировку работы оборудования во время рабочих движений манипулятора, изменение режима работы оборудования и т.д. В свою очередь, от технологического оборудования или других роботов могут поступать информационные и управляющие воздействия на данный робот (условно от датчиков ДЗ).
В робототехнических комплексах и ГПС на робот могут поступать задающие воздействия G1 от управляющих устройств более высокого ранга (уровня).
Так, от главной ЭВМ, управляющей работой комплекса или ГПС, могут поступать новые рабочие программы, а также команды, корректирующие заданную программу или координирующие действие робота-манипулятора с действиями других роботов или с процессом работы технологического оборудования.
В автономном режиме задающее воздействие G2 создается программой, хранящейся в ЗУ. В режиме наладки или обучения задающее воздействие G3 создается оператором через ПУ. При этом вычислительное устройство робота может быть различного уровня (в роботах с цикловым программным управлением ВУ вообще отсутствует). Чем универсальнее робот и сложнее задачи, решаемые с его помощью, тем выше уровень ВУ: микропроцессор, микро- или мини-ЭВМ. В робототехнических комплексах и ГПС используются ЭВМ средней и большой мощности, а также комплексы из нескольких ЭВМ.
Промышленные роботы-манипуляторы классифицируются по ряду следующих основных признаков, входящих в условное обозначение их типа:
числу манипуляторов (1М, 2М, ЗМ, ...);
числу степеней подвижности с учетом устройства передвижения (2; 3 и более);
типу рабочей зоны (плоская — Пл, поверхность — Пв, в форме параллелепипеда — Пр, шарообразная — Ш, комбинированная - ПрЦл, ЦлШ, ПрШ);
грузоподъемности;
типу приводов манипулятора (пневматический — Пн, гидравлический — Г, электромеханический — Э, комбинированный — ГПн, ГЭ, ЭПн);
типу системы управления (цикловая — Ц, позиционная — П, контурная — К, очувствленный робот — О, с искусственным интеллектом — И);
классу точности (0; 1; 2; 3).
Например, робот-манипулятор с условным обозначением 1М4Цл-5ЭК1 имеет один манипулятор с четырьмя степенями подвижности, рабочую зону цилиндрической формы, грузоподъемность 5 кг, привод электромеханический, систему управления контурную, первый класс точности (погрешность воспроизведения траектории от 0,01 до 0,05 %). Часть информации, характеризующей робот, указывается словесно (наличие устройства передвижения, раздельный или общий привод по степеням подвижности, адаптивное или неадаптивное управление, тип исполнения — теплозащитное, взрывобезопасное, нормальное и т.п.).