

13.2. Логические устройства автоматики
Управление многими технологическими процессами (ТП) предполагает подачу на исполнительный механизм (ИМ) команд типа открыть-закрыть, включить-отключить, которые могут передаваться сигналами, имеющими только два уровня значений. Независимо от физической сути сигнала эти уровни значений условно обозначают цифрами 0 и 1. Переменные, принимающие только два уровня значений, и соответствующие им сигналы называются двоичными.
Необходимость формирования команд, передаваемых двоичными сигналами, возникает при изменении последовательности выполнения технологических операций, остановке агрегатов в случае обнаружения нарушений их работоспособности вследствие поломки или отсутствия сырья, возникновении аварийной ситуации, необходимости защиты от неправильного или несанкционированного включения технологического оборудования и т.д.
Кроме того, аналогичные по форме командные сигналы должны формироваться (оператором или соответствующими датчиками) в случае обнаружения нарушения технологического процесса, например сигналы, запрещающие включение оборудования и оповещающие об этом обслуживающий персонал.
При управлении ТП необходимо формирование последовательности управляющих команд для соответствующих ИМ на основе логического анализа ситуации, поступающей от соответствующих датчиков и оператора. Такие команды формируются логическим управляющим устройством с использованием ограниченного числа типовых элементарных операций над сигналами.
Математическая основа синтеза логических устройств — алгебра логики, называемая булевой по имени ее создателя английского математика XIX в. Дж. Буля.
Булева алгебра оперирует переменными х1 х2 , ..., хn принимающими только два значения: 0 и 1, т.е. двоичными переменными. Функция двоичных переменных, называемая логической, также может принимать только два значения.
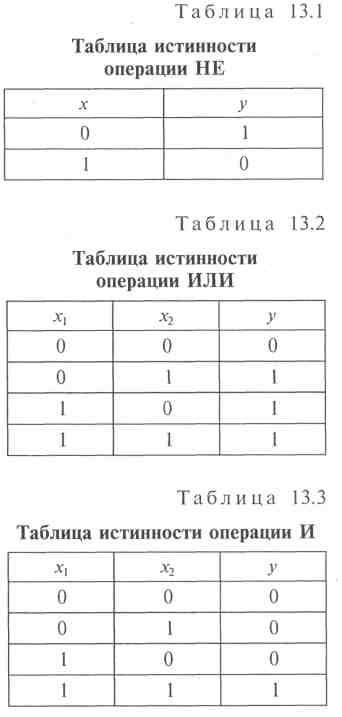
Инверсия — это логическая функция у одной двоичной переменной х. Если х = 0, то у = 1, а если х = 1, то у = 0.
Аналитическая запись инверсии
![]()
читается как у не х, поэтому ее выполнение часто называют операцией НЕ, или операцией отрицания (табл. 13.1).
Дизъюнкция — это логическая функция у, как минимум двух двоичных переменных х1,х2. Если обе переменные равны нулю, то функция также равна нулю. Если же хотя бы одна из переменных равна единице, то и функция равна единице. Выполнение этой функции называют операцией ИЛИ (табл. 13.2).
Аналитическая запись дизъюнкции
![]()
По форме записи ее называют функцией логического суммирования.
Конъюнкция — это логическая функция у, как минимум
двух двоичных переменных х1 х2. Функция равна единице, если обе переменные равны единице, и равна нулю, если хотя бы одна из переменных равна нулю. Выполнение конъюнкции называют операцией И (табл. 13.3).
Аналитическая запись конъюнкции:
![]()
По форме записи ее называют функцией логического умножения.