

8.3. Гидравлические двигатели
В гидравлическом двигателе входным и выходным сигналами являются перемещения, причем их выходное перемещение усилено по мощности, т.е. гидравлический двигатель одновременно может выполнять и функции усилителя мощности.
На рис. 8.10, а представлена схема конструкции гидравлического двигателя. Входной величиной двигателя является перемещение штока 1 в корпусе 2 золотникового цилиндра. Поршни 3 и 4 золотникового цилиндра управляют клапанами подачи и слива рабочей жидкости через трубопроводы 5 и 6 из силового цилиндра 7. Выходной величиной двигателя является перемещение штока 9 силового цилиндра.
В исходном состоянии трубопроводы 5 и 6 закрыты соответственно поршнями 3 и 4. При этом поршень 8 силового цилиндра неподвижен.
При перемещении штока 1 золотникового цилиндра вверх в верхнюю полость силового цилиндра 7 поступает жидкость по трубопроводу 5. При этом давление в верхней полости цилиндра 7 будет увеличиваться, а в нижней уменьшаться, т.е. поршень 8 будет перемещаться вниз, выталкивать жидкость из нижней полости.
Скорость перемещения штока 9 силового цилиндра определяется перемещением штока 7 (в установившемся режиме), а выходное перемещение у пропорционально интегралу от входного перемещения х:
![]()
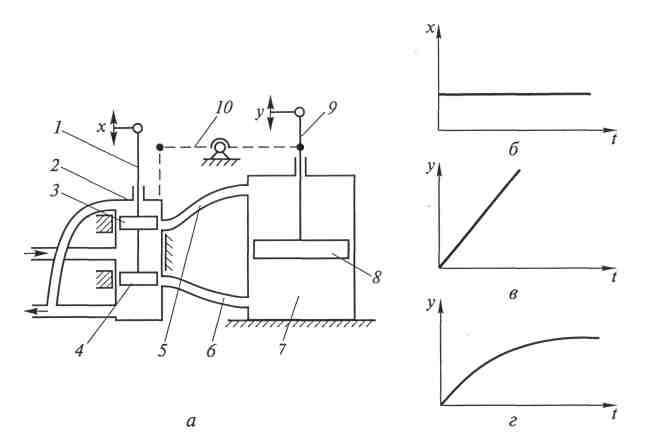
Рис. 8.10. Схема конструкции гидравлического двигателя (а) и графики
его входного сигнала (б), выходного при отсутствии обратной связи (в)
и выходного при наличии обратной связи (г):
/ — шток золотникового цилиндра; 2 — корпус золотникового цилиндра; 3, 4 — поршни золотникового цилиндра; 5, 6 — трубопроводы к силовому цилиндру; 7 — силовой цилиндр; 8 — поршень силового цилиндра; 9 — шток силового
цилиндра; 10 — рычаг
График изменения выходного сигнала у при подаче на вход двигателя постоянного перемещения х= 1 (рис. 8.10, б) приведен на рис. 8.10, в. Если соединить с помощью рычага 10 шток 9 и корпус 2 золотникового цилиндра (рычаг при этом будет выполнять функцию отрицательной обратной связи), то характер зависимости выходной величины от входной изменится: установившееся выходное перемещение у станет пропорционально входному перемещению х.
Механизм действия обратной связи заключается в следующем: одновременно с перемещением штока 9 вниз, корпус 2 золотникового цилиндра перемещается относительно поршней 3 и 4 вверх. При этом ранее открытые клапаны трубопроводов 5 и 6 постепенно закрываются, скорость движения поршня 8 уменьшается, и, отработав определенное перемещение, он останавливается.
Введение отрицательной обратной связи позволяет использовать двигатель в качестве усилителя. Переходная характеристика гидроусилителя с обратной связью показана на рис. 8.10, г.
Гидравлические усилители и двигатели широко применяются в промышленной и авиационной автоматике, так как имеют значительно меньшую массу, приходящуюся на единицу выходной мощности, нежели электронные, магнитные и электромашинные усилители.
Инерционные свойства гидравлических усилителей незначительны вследствие малой сжимаемости жидкости и повышаются они только при наличии длинных или узких трубопроводов, а также вязкой рабочей жидкости. Скорость на выходе гидроусилителей обычно невелика, поэтому они могут работать в качестве исполнительных устройств без редукторов.
Недостатком гидроусилителей является малая надежность трубопроводов и особенно их соединений в условиях вибрации, ударов и других разрушающих воздействий, приводящая к утечкам жидкости. Гидроусилитель подвержен также влиянию окружающей температуры (жидкость может изменять вязкость и замерзать).