

7.3. Тяговые и механические характеристики электромагнитного реле
Электромагнитное тяговое усилие (сила притяжения якоря к катушке реле) прямо пропорционально квадрату намагничивающей силы (МДС) (т.е. оно не зависит от направления тока в управляющей обмотке) и обратно пропорционально квадрату длины 5 воздушного зазора.
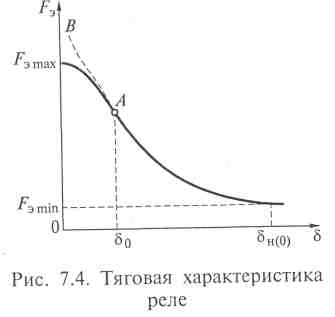
В процессе срабатывания реле изменяется длина воздушного шора, а следовательно, и электромагнитное усилие, воздействующее на якорь. Зависимость электромагнитного усилия Fэ от длины воздушного зазора δ между якорем и сердечником называется тяговой характеристикой электромагнитного реле (рис. 7.4).
![]()
Так как после отключения обмотки реле части магнитопровода сохраняют некоторую намагниченность, обусловленную коэрцитивной силой, то при δ → 0 возможно «залипание» притянутого якоря под действием остаточного магнетизма стали. Для уменьшения этого притяжения, т.е. исключения «залипания», применяют немагнитный штифт (в виде наклепки или прокладки), который закрепляется на вертикальной части якоря напротив оси сердечника (см. рис. 7.2, а, б). С помощью штифта, толщина которого δ0= 0,1 мм, при притянутом якоре обеспечивается некоторый минимальный воздушный зазор δ > δ0, что облегчает отход якоря при выключении тока (так как создается достаточное магнитное сопротивление, которое уменьшает остаточный магнитный поток до минимального значения). Работа электромагнитного реле сводится к замыканию и размыканию контактных пружин, число которых в разных конструкциях реле колеблется в пределах 2... 16 и более.
Перемещению якоря по направлению к сердечнику в процессе притяжения противодействуют силы упругих элементов реле — возвратной и контактных пружин. При разных положениях якоря эти силы различны, т.е. противодействующие силы зависят от длины воздушного зазора 5. Зависимость механических (противодействующих) сил от длины воздушного зазора между якорем и сердечником Fм = f(δ) называется механической характеристикой реле. Силы, преодолеваемые якорем реле при его перемещении, изображаются, как правило, в виде ломаных линий.
В качестве примера рассмотрим построение механической характеристики реле с контактной группой, действующей на замыкание (рис. 7.5). В процессе работы реле якорь 3 сначала преодолевает натяжение спиральной пружины П, а затем после перемещения якоря на расстояние 8Ь являющееся холостым ходом, его плечо т производит подъем контактных пружин 1 и 2.
На горизонтальной оси механической характеристики в виде отрезка Оа откладывается расстояние δн(0) — между торцом сердечника и якорем в нерабочем состоянии реле, равное сумме холостого хода якоря 8Ь его рабочего хода δ2 + δ3, проекций отрезков еf и dс и длины штифта отлипания δ0. На оси ординат откладывается сила, которую преодолевает якорь при перемещении.
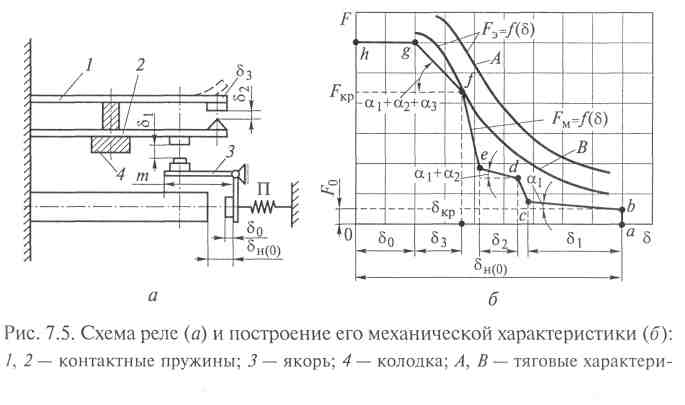
В отпущенном положении якорь испытывает лишь натяжение возвратной спиральной пружины (точка b), а контактные пружины удерживаются колодкой 4 и прижимаются к нему силой предварительного натяжения, что устраняет вибрацию контактов при обратном ходе якоря. Ордината аb характеризует усилие F0, действующее на якорь в исходном положении (и необходимое для его сдвига из начального положения).
На протяжении холостого хода якоря (участок δ1 происходит растяжение пружины П, причем нагрузка якоря равномерно растет — отрезок bс. Угол наклона а] характеризуется упругими свойствами пружины П. При соприкосновении упора, имеющегося на плече т, с нижней контактной пружиной 2 якорь преодолевает первоначальное натяжение этой пружины, несколько изгибая ее (участок cd). В точке d нижняя контактная пружина отходит от колодки, и якорь на участке dе преодолевает совместное сопротивление двух пружин (возвратной спиральной и нижней контактной). Угол наклона участка dе равен сумме двух углов α1 + α2, где α2 — угол, зависящий от упругих свойств нижней контактной пружины. Перемещение якоря на этом участке характеризуется абсциссой δ2.
С момента снятия нижней пружины с колодки происходит ее подъем до замыкания контакта между пружинами / и 2. После замыкания контакта (точка е) якорь начинает преодолевать предварительное натяжение верхней контактной пружины — участок еf. В точке/верхняя пружина снимается с колодки, и на участке fg якорь преодолевает противодействие трех пружин (двух контактных и одной спиральной). Угол наклона участка fg определяется суммой трех углов α1 + α2 + α3, где α3 - характеризуется упругими свойствами верхней контактной пружины. Для надежности замыкания контактов, которое теоретически произойдет в точке f, якорь должен дополнительно переместиться на расстояние δ3 (чтобы обеспечить необходимое контактное усилие порядка 2,6...5,1 Н). От последней построенной точки g проводится горизонтальная прямая gh, которая определяет длину штифта отлипания δ0.
Из построения нетрудно понять, что отрезки ломаной линии характеризуют отдельные элементы работы пружин. Для притяжения якоря реле необходимо, чтобы электромагнитное усилие Fэ на всем пути его движения было больше противодействующих сил. Для обеспечения этого условия тяговая характеристика реле (кривая А на рис. 7.5, б) должна располагаться немного выше его механической характеристики.
При расчете берут тяговую характеристику, соприкасающуюся с механической хотя бы в одной точке/(кривая В на рис. 7.5, б), координаты которой называются критическими. Намагничивающая сила F, обеспечивающая такое расположение характеристики, рассчитывается по критическому усилию Fкр и критическому зазору δкр.