

7.6. Контакты реле. Средства дуго- и искрогашения
Контакты, являясь важнейшими элементами реле, определяют надежность и срок их службы. По характеру работы контакты подразделяются на замыкающиеся, которые при отсутствии сигнала в обмотке разомкнуты, а при наличии тока в управляющей обмотке замыкаются, и размыкающиеся, которые при отсутствии сигнала в обмотке замкнуты, а при наличии сигнала в обмотке размыкаются. В процессе работы реле контакты могут находиться в следующих состояниях: замкнутом, в процессе размыкания, разомкнутом и в процессе замыкания.
Тяжелым условиям работы контактов, т.е. при которых происходит их наибольший износ, соответствуют замкнутое состояние (через контакты течет весь ток нагрузки) и процесс размыкания (между контактами возникает дуга).
По мере увеличения усилия Fk, действующего на контакты, увеличивается площадь их соприкосновения, а переходное сопро- , тивление уменьшается. При наличии на поверхности контактов окисной пленки необходимо, чтобы механическое напряжение в точках контакта было достаточным для ее разрушения.
Зависимость переходного сопротивления контактов от контактного усилия следующая:
Rк = а/(0,1Fk)b,
где.а — коэффициент, зависящий от свойств контактного материала и шероховатости контактной поверхности; Fk — контактное усилие; Ь — показатель, характеризующий форму контактов.
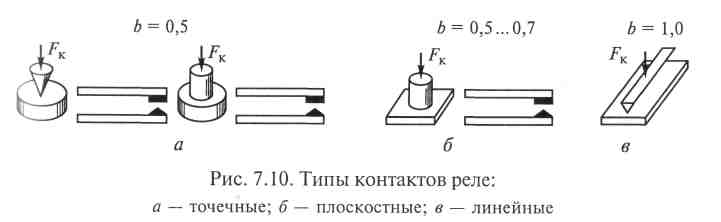
Контакты по форме контактирующих поверхностей и в зависимости от тока, на который они рассчитаны, делятся на три основные группы (рис. 7.10):
точенные — в виде конуса и плоскости или полусферы и плоскости (т. е. теоретически с соприкосновением в одной точке), рассчитанные на небольшие токи;
плоскостные — в виде плоскости и плоскости, рассчитанные па средние токи;
линейные — с соприкосновением по линии, рассчитанные на Сюльшие токи.
Наиболее распространены реле малой и средней мощности с I очечным контактом, обеспечивающим надежное электрическое соединение при небольшом контактном давлении. Контакты таких реле закрепляются на упругих плоских пружинах.
Существуют контакты специальных типов: вакуумные и ртутные.
К материалам, из которых изготовляются контакты, предъявляются особые требования: они должны быть механически прочными, твердыми, иметь высокие температуры плавления, обладать хорошей тепло- и электропроводностью, легко обрабатываться, быть устойчивыми к коррозии и эрозии, а также дешевыми.
На практике при выборе материала контактов учитывают следующие соображения:
для реле, рассчитанных на малые контактные усилия 0,01... .0,03 Н и при необходимости высокой чувствительности, используют платину;
для реле, рассчитанных на контактные усилия 0,05... 1 Н и малую частоту срабатываний, используют серебро;
для реле, рассчитанных на контактное усилие 0,3... 1 Ни большую частоту срабатываний, используют металлокерамику;
для реле, рассчитанных на контактное усилие свыше 1 Н и большую частоту срабатываний, используют вольфрам.
Причиной интенсивного разряда является наличие в управляемой цепи реактивного сопротивления. Если оно имеет емкостный характер, то интенсивное искрение наблюдается при замыкании контактов. Если же в управляемой цепи имеется значительная индуктивность, то особенно сильный и затяжной разряд возникает при разрыве этой цепи из-за образующегося перенапряжения на контактах. В большинстве случаев управляемая цепь содержит индуктивность.
Применяются два основных метода искро- и дугогашения: шунтирование индуктивности разрываемой цепи и шунтирование контактов. В обоих случаях, пока контакты замкнуты в магнитном поле индуктивности, накапливается энергия, которая при размыкании контактов расходуется не в дуге, а в шунтирующем устройстве. Методы искрогашения сводятся к обеспечению замедленного исчезновения тока.
На рис. 7.11 изображены основные схемы искрогашения в контактах. В схеме, показанной на рис. 7.11, а, применяется метод шунтирования индуктивной нагрузки последовательным включением емкости с сопротивлением Rш. В момент размыкания контактов в контуре, образованном нагрузкой и шунтом, под действием энергии, запасенной в магнитном поле, возникает ток переходного процесса, который протекает еще некоторое время после размыкания контактов, предотвращая тем самым наведение высокой ЭДС самоиндукции. Энергия магнитного поля переходит в теплоту, которая выделяется на сопротивлении шунта Rш. Наличие конденсатора в схеме исключает прохождение тока нагрузки при замкнутых контактах, а следовательно, исключаются потери энергии в сопротивлении шунта.
Для того чтобы в контуре Lн—Rн— С—Rш не возникли автоколебания тока, емкость выбирают из условия
Rн
+
Rш
≥
2![]()
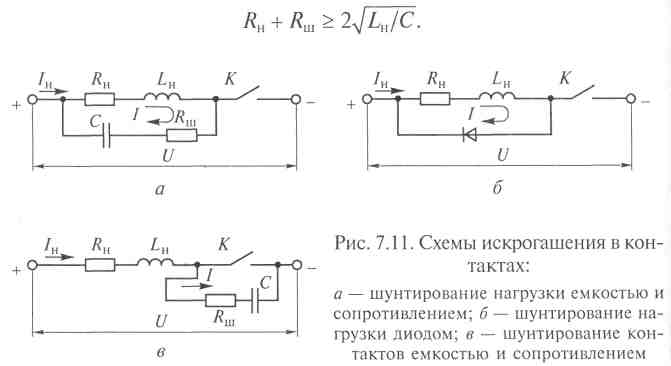
В схеме на рис. 7.11, б диод шунтирует индуктивную нагрузку и пропускает ток переходного процесса I, который создает ЭДС самоиндукции в момент разрыва управляемой цепи. При замкнутых контактах диод заперт напряжением сети и не пропускает ток нагрузки.
На рис. 7.11, в изображена схема шунтирования контактов емкостью с сопротивлением. Здесь емкость исключает протекание тока нагрузки в шунтирующей цепи при разомкнутых контактах. Кроме того, устраняется расход энергии как в цепи нагрузки, так и в шунтирующем сопротивлении, поскольку конденсатор не пропускает постоянный ток. Цепочка Rш—С создает путь мимо контактов для убывающего после их разрыва тока нагрузки и для рассеяния энергии, запасенной в магнитном поле цепи нагрузки.
После размыкания контактов по мере зарядки конденсатора от нуля до напряжения питания V ток нагрузки постепенно уменьшается до нуля. Таким образом, перенапряжения на контактах не возникает, т.е. напряжение на контактах, как и на конденсаторе, постепенно увеличивается до значения U. Ток в этом случае проходит мимо контактов через цепочку Rш—С, и дуговой разряд не возникает. Так как на практике емкость конденсатора выбирают порядка 0,5...2 мкФ, то зарядка конденсатора будет происходить медленно и, следовательно, напряжение на контактах будет также нарастать достаточно медленно по сравнению с их расхождением.