

12.6. Критерии устойчивости сау Алгебраический критерий устойчивости Рауса-Гурвица
В этом случае исходным при анализе замкнутой САУ на устойчивость является характеристическое уравнение замкнутой САУ:
![]()
По критерию Рауса-Гурвица необходимым условием устойчивости замкнутой САУ (в которой все действительные корни характеристического уравнения отрицательные, а у комплексных корней — отрицательная действительная часть) являются положительные коэффициенты ап...а1 и свободный член а0 исходного характеристического уравнения. Это условие является также достаточным для систем с характеристическим уравнением 1 и 2-го порядков. Естественно, при п = 1 характеристическое уравнение имеет вид
a1p + a0 = 0,
т.е если a1 > 0 и a0 > 0, то корень р < 0, и САУ устойчивая.
![]()
В этом случае, если а12 < 4а2а0, корни могут быть комплексные, но действительная их часть всегда будет отрицательной, если а2 , а1 , а0 > 0.
Для систем выше второго порядка при сохранении необходимого условия устойчивости ап... а0 > 0 достаточным условием будут положительные знаки определителей Гурвица, т.е. главного определителя матрицы и ее диагональных миноров, которые составляются по определенному правилу из коэффициентов ап...а1 и свободного члена а0 характеристического уравнения замкнутой САУ.
Для системы третьего порядка с характеристическим уравнением
![]()
определитель такой матрицы
![]()
При этом если Δ1> 0, то САУ устойчивая.
![]()
а также определитель диагонального минора:
Следовательно,
![]()
Данный алгебраический критерий устойчивости для систем выше пятого порядка, как правило, не применяется, поскольку тогда вычисление определителей Гурвица становится сложной задачей. Для таких систем можно применить частотные критерии устойчивости Михайлова и Найквиста.
Частотный критерий устойчивости Михайлова
Исходным при анализе замкнутой системы на устойчивость по критерию А. В. Михайлова (русский математик, разработавший этот критерий в 1930 г.) также является характеристическое уравнение замкнутой САУ:
![]()
Заменив в этом уравнении оператор Лапласа р на выражение iω в соответствующей степени, получают аналитическое выражение вектора Михайлова, который делят на действительную и мнимую части:
![]()
Далее строят годограф вектора Михайлова — кривую, которая описывает конец этого вектора на комплексной плоскости при изменении частоты ω от 0 до ∞.
Определение: замкнутая система будет устойчивой, если годограф вектора Михайлова (при ω = 0), начиная свое движение с положительной действительной полуоси комплексной плоскости (а0 > 0),
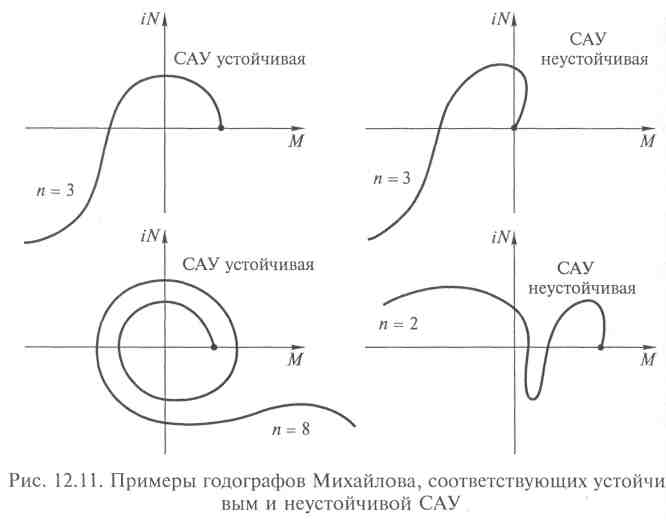
двигаясь против часовой стрелки и нигде не обращаясь в нуль, последовательно обходит столько квадрантов комплексной плоскости, каков порядок исходного характеристического уравнения замкнутой системы, и уходит в последнем квадранте в бесконечность.
На рис. 12.11 даны примеры годографов Михайлова, соответствующих устойчивым и неустойчивым САУ.
Критерий устойчивости Михайлова удобно применять для систем высокого порядка, т.е. с п = 6, 8, 10. При делении аналитического выражения вектора Михайлова на действительную и мнимую части в первую — попадают члены с четной степенью, так как i2= -1, i4 = +1, i6 = -1, а в последнюю — с нечетной, так как i1 = i, i3 = -i, i5 = i. При построении годографа Михайлова, задавая значения со < 1, можно учитывать члены с низкими степенями, а задавая значения ω > 1, — с высокими.