

9.2. Апериодическое (инерционное, статическое) звено
Типовое дифференциальное уравнение взаимосвязи выходного и входного сигналов апериодического ТДЗ имеет вид
![]()
где Т0 — постоянная времени; к — коэффициент передачи.
Дифференциальное уравнение является неудобной формой математической модели звена или объекта, так как решение большинства дифференциальных уравнений — это сложная вычислительная процедура. Более удобна математическая модель объекта, записанная в виде передаточной функции.
Передаточной функцией называется преобразованное по Лапласу исходное дифференциальное уравнение, т.е. уравнение, записанное в виде отношения преобразованных по Лапласу выходного и входного сигналов звена (объекта).
В преобразовании по Лапласу исходное дифференциальное уравнение называется оригиналом, а преобразованное и записанное в операторной форме уравнение — его изображением. Суть преобразования Лапласа заключается в замене функций вещественных переменных — хвых(τ) и хвх(τ) на функции комплексных переменных — хвых(р) и хвх(р), где р — оператор Лапласа (комплексное число р = ± т ± in). Эти функции связаны между собой интегралом Лапласа:
Для большинства дифференциальных уравнений, используемых в ТДЗ, чисто формальным условием перехода от оригинала к изображению будут следующие замены:
![]()
Таким образом легко можно получить из оригинала изображение, т.е. операторную форму записи дифференциального уравнения апериодического ТДЗ.
Дифференциальное уравнение апериодического звена — оригинал имеет вид
![]()
![]()
а операторная
форма записи — изображение этого
уравнения
Огромное преимущество такого преобразования заключается в том, что записанное в операторной форме исходное дифференциальное уравнение становится алгебраическим.
Если бы все дифференциальные уравнения можно было преобразовать по Лапласу, это была бы революция в развитии математики, так как решать алгебраические уравнения значительно проще. К сожалению, это возможно только для небольшого их числа, например для дифференциальных уравнений ТДЗ.
Поскольку уравнение изображения апериодического звена алгебраическое, его можно преобразовать следующим образом:
![]()
Из этого выражения легко получить отношение хвых(р)/хвх(р), которое называется передаточной функцией и для апериодического звена имеет вид
![]()
Каждое типовое динамическое звено имеет ряд типовых частотных характеристик: амплитудно-частотную (АЧХ); фазочастотную (ФЧХ); амплитудно-фазовую частотную АФЧХ (или АФХ); логарифмическую амплитудно-частотную (ЛАЧХ); логарифмическую фазочастотную (ЛФЧХ).
На практике чаще используют амплитудно-фазовую частотную характеристику (или АФХ).

Вектор аналитически можно записать в виде двух проекций на действительную и мнимую оси, и выразить эти проекции через угол α:

где
| W
|
— вектор по модулю, или длина вектора;
е = 2,71 — основание
натуральных логарифмов; i
— мнимое
число, i=![]() i2=-1
i3=-1
i4=
+1.
i2=-1
i3=-1
i4=
+1.
Аналитическое выражение вектора АФХ любого ТДЗ легко получить через передаточную функцию, заменив в ней оператор Лапласа p на выражение iω, где ω — частота колебаний, ω= 2π/Т ; Т — период колебаний.
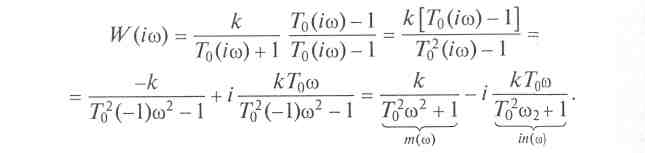
Для апериодического звена АФХ имеет вид
![]()
Чтобы записать вектор АФХ в виде суммы проекций на действительную и мнимую оси, необходимо провести следующие преобразования:
Изменяя частоту со от 0 до ∞, можно построить на комплексной плоскости график вектора АФХ — его годограф (рис. 9.5), представляющий собой полуокружность, расположенную в четвертом квадранте комплексной плоскости, диаметр которой равен коэффициенту к.
На рис. 9.6 приведена типовая кривая разгона апериодического звена, которая называется экспонентой. Любая экспонента обладает одним замечательным свойством: если к любой ее точке провести касательную, а затем точку касания и точку пересечения касательной с асимптотой, к которой с течением времени приближается экспонента, спроецировать на ось времени, то получится один и тот же отрезок на оси времени. Эта проекция, называемая постоянной времени, соответствует коэффициенту Т0 в передаточной функции и АФХ апериодического звена, а ордината
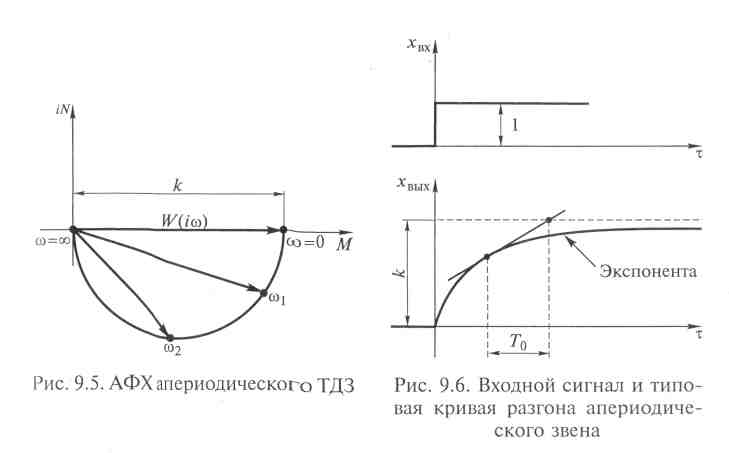
асимптоты, к которой стремится экспонента, — коэффициенту к в его передаточной функции. Таким образом по кривой разгона легко найти коэффициенты к и Т0 в передаточной функции апериодического звена.
Примером реализации апериодического звена является электродвигатель небольшой мощности, который после включения в электросеть (подачи единичного скачка) набирает обороты по экспоненте.
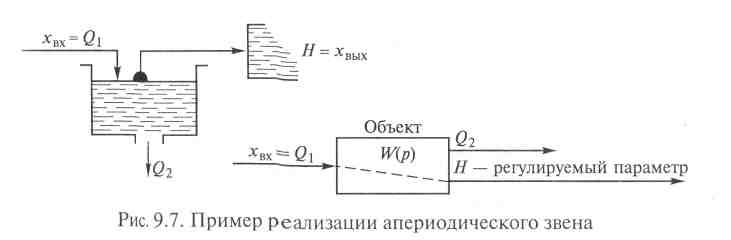
Также примером реализации апериодического звена может быть установка, изображенная на рис. 9.7.
В бак поступает поток воды с расходом Q1; из бака вытекает свободно поток воды с расходом Q2. Регулируемый параметр хвых — это уровень Н воды в баке.
При подаче единичного скачка Q1 уровень Н в баке повышается; при этом увеличивается гидростатическое давление и возрастает Q2. Затем уровень воды Н стабилизируется (т.е. экспонента приближается к асимптоте).
Эта способность самостоятельно восстанавливать равновесие, присущая объектам, аппроксимируемым апериодическим ТДЗ, за счет притока или стока энергии или вещества называется самовыравниванием. Количественно самовыравнивание определяется коэффициентом р, равным обратному значению коэффициента к в передаточной функции звена, т.е. р = 1/k.
В литературе объекты с передаточной функцией апериодического звена называют статическими.