

14.2. Принципы построения систем телемеханики
Системы телемеханики используют для контроля и управления объектами на расстоянии. По аналогии с классификацией систем автоматического контроля и управления здесь также различают системы телеконтроля, т. е. системы, обеспечивающие контроль, регистрацию или сигнализацию о состоянии параметров ОУ на расстоянии, и системы телеуправления, т. е. системы, обеспечивающие контроль параметров ОУ и управление ими на расстоянии.
Системы телемеханики применяют в ирригационных сооружениях, электросистемах, тепличных и других комплексах, т.е. там, где необходимо контролировать и управлять объектом на больших расстояниях.
Основные элементы системы телемеханики:
источник информации — собирает, хранит и выдает исходные данные, которые необходимо передавать на расстояние. Источниками информации в системах телеконтроля являются датчики, регистрирующие приборы и ЭВМ, а в системах телеуправления — программные устройства, ЭВМ и человек, управляющий объектом на расстоянии;
распределитель (шифратор) — шифрует передаваемую информацию, так как по каналу связи одновременно передается информация о нескольких параметрах объекта или же необходимо управлять несколькими ОУ;
передатчик — преобразует управляемый параметр в сигнал, передаваемый по выбранному каналу связи;
канал связи — обеспечивает передачу закодированного сигнала на требуемое расстояние. В качестве каналов связи применяют линии связи (телефонные, телеграфные, радиолинии) и линии электропередач низкого и высокого напряжения;
приемник — воспринимает сигналы передатчика по каналам связи и преобразует их в сигналы для избирателя;
избиратель (дешифратор) — дешифрует закодированные сигналы, переданные по каналу связи;
получатель информации — измерительные, регистрирующие и сигнализирующие приборы в системах телеконтроля и исполнительные механизмы ОУ в системах телеуправления.
Система элементов, обеспечивающая сбор, хранение и выдачу в каналы связи сигналов контроля параметров ОУ, а также воспринимающая сигналы управления его параметрами, представляет собой пункт контроля.
Для передачи информации по каналам связи системы телемеханики используются ток или напряжение с такими качественно различными характеристиками, как полярность, амплитуда, длительность импульсов или пауз, частота или фаза сигнала.
Один и тот же объем информации у можно передать либо по определенному числу п проводов канала связи, либо по одному каналу связи, увеличив число качественных признаков т сигнала, т.е.
у = 2 п, или у = 2 т.
По трехпроводной линии связи телеуправления (рис. 14.4, а) и только при двух признаках сигнала: «Есть сигнал» и «Нет сигнала» передается объем информации у = 2 п = 2 3 = 8 сигналам (рис. 14.4, 6), используемым, например, для управления четырьмя магнитными пускателями КМ1... КМ4 (рис. 14.4, в).
По четырехпроводной линии связи передается объем информации у = 24 = 16, т.е. соответственно можно управлять 8 и 16 объектами и т.д.
Такое же число сигналов можно передать по однопроводному каналу связи (КС) кодированными по частоте сигналами. Например, четырьмя магнитными пускателями можно управлять кодированными по частоте сигналами (рис. 14.4, г), используя три генератора частоты GF1... GFЗ (качественный признак сигнала т = 3). Тогда у = 23= 8. Однако при этом необходимо декодировать сигналы, переданные по каналу связи, с помощью фильтров частоты UF1...UFЗ.
Увеличивая число генераторов, можно соответственно передавать 16, 32 и более сигналов.
В обоих рассмотренных схемах ТУ (см. рис. 14.4, а, в) сначала с помощью ключей SА1...SАЗ набирают код сигнала у, а затем нажатием кнопки SВ1 этот сигнал передается на КП.
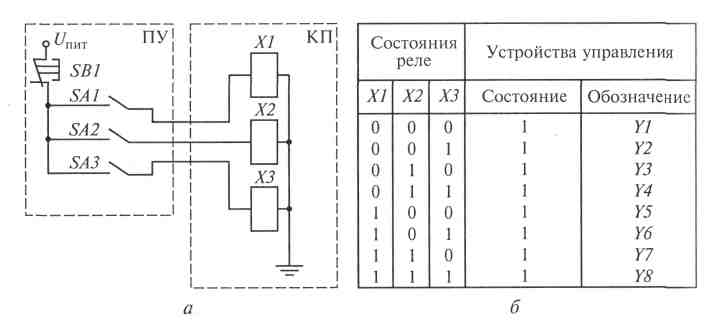
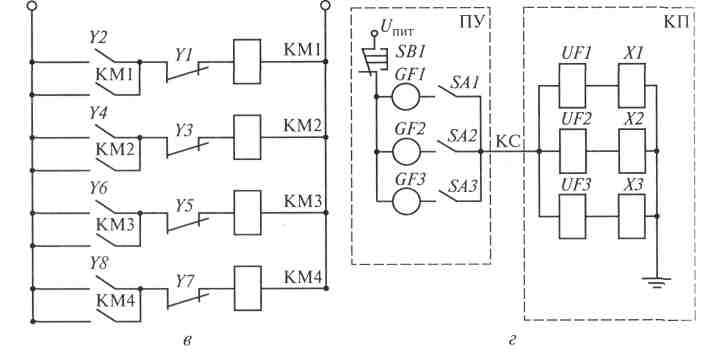
Рис. 14.4. Схема ТУ по трехпроводной линии связи (а), таблица состояний устройств управления (б), пример управления четырьмя магнитными пускателями (в) и схема ТУ кодированными по частоте сигналами (г)
В системах телемеханики стремятся к уменьшению числа каналов связи из-за их высокой стоимости и материалоемкости, поэтому для увеличения количества передаваемой информации используют увеличение числа качественных признаков сигналов. В основном применяют сигналы, различающиеся по частоте или длительности импульсов и пауз. При частотном способе разделения сигналы по линии связи передаются параллельно или последовательно, а при времяимпульсном (по длительности импульсов или пауз) — только последовательно.
С помощью систем телеизмерения производят дистанционное измерение электрических и неэлектрических величин. Телеизмерение осуществляется без непосредственного участия человека и может быть использовано для контроля, регистрации, сигнализации о состоянии ОУ и управления (регулирования) его параметрами.
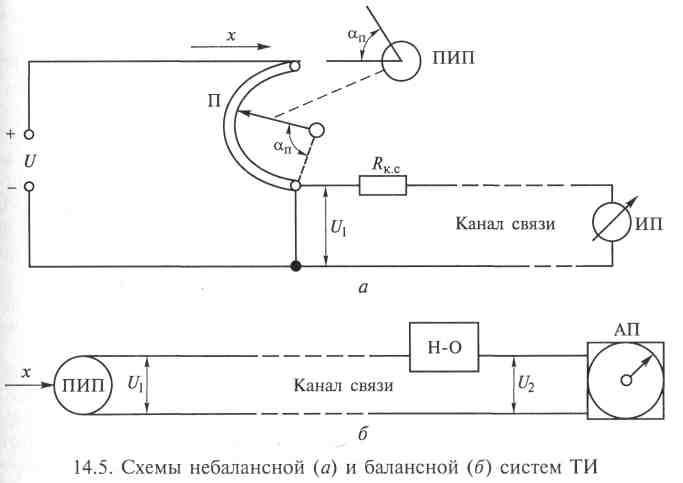
В небалансных системах ТИ (рис. 14.5, а) измеряемый параметр х преобразуется первичным измерительным преобразователем (ПИП) в угол поворота αп подвижной щетки потенциометра (П), которому пропорционально напряжение U1 передаваемое по каналу связи и фиксируемое измерительным прибором (ИП). Так как канал связи обладает сопротивлением Rк.с, то при передаче происходит потеря информации. Чем длиннее канал связи, тем больше потери информации.
Увеличить расстояние передачи информации позволяют балансные системы ТИ (рис. 14.5, б), в которых непрерывно сравниваются напряжения U1 и U2. На приемной стороне линии связи установлены автоматический потенциометр (АП) и нуль-орган (Н-О), фиксирующий отсутствие тока в линии, что происходит при U1 = U2. При появлении тока в линии нуль-орган воздействует на АП до тех пор, пока не установится положение, при котором U1 = U2. Значение напряжения U2, отображаемое на шкале потенциометра АП, пропорционально значению измеряемого параметра х.
Для измерения параметров величин ОУ на больших расстояниях используют времяимпульсные или частотные системы ТИ. Во времяимпульсных системах измеряемый параметр преобразуется в интервалы времени, а в частотных — в частоту. При этом на приемной стороне линии связи происходит обратное преобразование импульсов, пауз или частот соответственно в напряжение или ток, отображаемые аналоговыми приборами, или в число импульсов при цифровом отсчете.
Несмотря на одинаковое построение систем телеуправления и телесигнализации назначение их различно: система ТУ предназначена для управления параметрами ОУ, и сигналы в ней передаются от ПУ к ОУ; система ТС предназначена для контроля параметров ОУ, и сигналы в ней передаются от ОУ к ПУ.
В системах ТУ и ТС применяют следующие виды управления: двухступенчатое, иерархическое (многоступенчатое), циркулярное и циклический опрос ОУ.
При двухступенчатом управлении в системах ТУ диспетчер с помощью ключей SА1...SАЗ (см. рис. 14.4, a, в) на пульте пункта управления выбирает требуемый ОУ, а затем посылает команду «Включить» или «Отключить» с помощью общего ключа (кнопки) SВ1. В системах ТС функции диспетчера выполняют автоматические устройства, которые могут быть расположены как на пульте ПУ, так и на пульте КП. Двухступенчатость уменьшает вероятность неправильной посылки команды. На ПУ должна быть предусмотрена либо местная, либо поступившая с КП сигнализация о выбранном объекте, подтверждающая выполнение подготовительной операции.
Иерархическое управление основано на разделении информации по определенным уровням, что позволяет создать многоступенчатые системы ТУ и ТС. Информация, возникающая на каждой ступени, почти полностью замыкается в пределах этой ступени, и лишь часть ее передается на более высокую ступень. Самая нижняя ступень — это местные системы автоматики, которые самостоятельно воздействуют на ОУ. С контролируемых пунктов информация поступает на пункт управления, где она обобщается, а уже затем передается на центральный диспетчерский пункт (ЦДП). На нижестоящие ступени управления ЦДП также могут поступать обобщенные команды.
Циркулярное управление характеризуется одновременной передачей информации для многих объектов, т. е. по одной команде происходит управление многими объектами.
При циклическом опросе на КП поочередно передается информация о состоянии отдельных ОУ или групп ОУ. Циклический опрос проводится периодически по мере необходимости или автоматически по заданной программе.
Системы ТС получают следующие сигналы:
о состоянии ОУ и самих систем телемеханики, подтверждающих выполнение команды, поданной с ПУ (известительная сигнализация);
о выходе измеряемого параметра за заранее установленные пределы (предупредительная и аварийная сигнализации).
В системах ТМ наиболее перспективны цифровые способы передачи информации. При удаленности ОУ от ПУ на 0,2... 1,0 км используют многопроводные каналы связи и параллельное кодирование передаваемых сигналов, при удаленности на 2 ...5 км — четырехпроходные линии связи и параллельно-последовательное кодирование, а при удаленности более чем на 5 км — двухпроводные линии связи и последовательное кодирование сигналов.