

5.2. Устройства сравнения
Сравнивающие устройства или элементы сравнения являются неотъемлемой частью любой системы автоматического управления. К одному из входов сравнивающего устройства, как правило, подключается датчик, к другому — задающее устройство (задат-чик).
В качестве задающих устройств в электрических схемах сравнения обычно используют переменные резисторы, а в отдельных случаях — многоцепные переключатели с набором резисторов, потенциометры с профильными каркасами, кулачковые механизмы и другие устройства. С развитием вычислительной техники в качестве задающего устройства стали использоваться специальные программы.
В сравнивающих устройствах управляемая величина у, контролируемая датчиком, сравнивается с сигналом задания #, формируемым задатчиком. На выходе сравнивающего устройства устанавливается исполнительный механизм (ИМ), который в зависимости от сигнала рассогласования 8, определяемого выражением
![]()
может находиться в состоянии равновесия (при 8=0) или рабочем состоянии (при ε=0). Пусковое устройство включает ИМ в целях устранения рассогласования.
В кинематических схемах сравнение механических величин может осуществляться с помощью рычага (рис. 5.4, а), равновесие которого определяется соотношением
![]()
где Fх, Fзад — соответственно контролируемое и заданное усилия;
![]()
В соответствии с этим выражением сигнал рассогласования
![]()
Следовательно, рычаг может быть использован для сравнения усилий.
Сравнение заданного рзад и контролируемого рх давлений в гидравлических и пневматических устройствах можно рассмотреть на примере схемы, приведенной на рис. 5.4, б. При рх = рзад выходные сигналы одинаковые: р1 = р2, а ИМ находится в состоянии равновесия. При рх > рзад и р1 > р2 поршень перемещается вверх. Прирх < рзад поршень перемещается вниз.
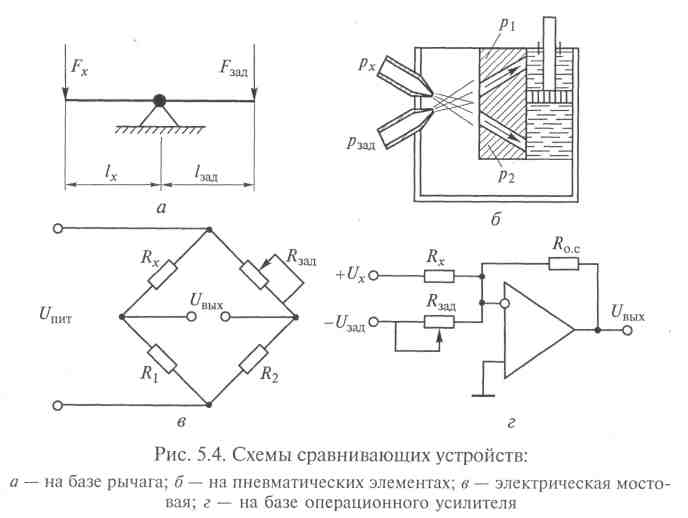
К электрическим сравнивающим устройствам относятся мостовые, потенциометрические, трансформаторные, дифференциально-трансформаторные схемы, электромеханические устройства, нуль-органы и др.
Мостовая схема сравнения постоянного тока (рис. 5.4, в) состоит из задающего резистора Rзад , датчика Rх , сопротивление которого зависит от изменения управляемой величины, и двух образцовых резисторов с сопротивлениями R1 и R2. На одну из диагоналей схемы подают напряжение питания Uпит, с другой ее диагонали снимают выходное напряжение Uвых, которое питает ИМ (например, поляризованное реле).
![]()
![]()
Считая Rзад = g и Rх R 2/ R1 = у, получим исходное выражение для сигнала рассогласования:
![]()
Электрическое устройство сравнения может быть выполнено на базе операционного усилителя (рис. 5.4, г). При этом на датчик
Rх подается напряжение +Ux а на задатчик Rзад - напряжение обратной полярности -Uзад.
Выходное напряжение усилителя
Uвых = - Ro.c (Ux / Rx – Uзад / Rзад) ,
где Ro.c — сопротивление обратной связи усилителя.
При использовании операционного усилителя для сравнения напряжений Ux и Uзад, считая Rx = Rзад = Ro.c получают выражение с, тождественное исходному выражению для сигнала рассогласования, если принять g = Uзад и у = Ux .
Операционный усилитель может быть также использован для сравнения сопротивлений Rx и Rзад . Тогда получают значение выходного напряжения усилителя, зависимое от изменения Кх. В этой схеме результат сравнения имеет непрерывную форму.
Наряду с рассмотренными устройствами в автоматике широко распространены устройства сравнения дискретного типа, которые могут выражать отклонение в виде числа (это различные счетчики, шаговые искатели и др.) или в виде логических категорий. Примерами устройств последнего типа могут служить различные релейные элементы.
Простейшие реле постоянного или переменного тока срабатывают, когда ток в цепи срабатывания достигает большего значения, нежели установленный для них предел. Следовательно, факт срабатывания — это сигнал «больше»:
Поляризованные реле, имеющие несколько обмоток, могут осуществлять алгебраическое суммирование нескольких величин. Направление переброски якоря определяется знаком сигнала рассогласования.
Контрольные вопросы
Каково назначение задающего устройства в САУ?
Как и в каком виде вводятся заданные величины в различных САУ?
Как работают и чем отличаются командоаппараты непрерывного и дискретного действия?
Приведите схемы кулачковых задающих устройств.
Поясните работу задающего устройства, выполненного по релейной схеме.
Какова функция устройств сравнения в составе САУ?
Поясните работу электрической мостовой схемы сравнения.
Как можно сравнивать механические величины?