

Бесконтактные логические элементы
Развитие электроники связано с появлением и быстрым совершенствованием интегральной элементной базы, используемой в том числе и при разработке управляющих устройств. Устройства, выполненные на интегральной элементной базе, обладают малыми размерами, массой и высокой надежностью.
В развитии технологии цифровых интегральных схем условно можно выделить три этапа:
1-й этап — разработка базовых серий схем, выполняющих простые логические функции (И—НЕ, ИЛИ—НЕ, НЕ и др.) и имеющих от 10 до 50 элементов в одном корпусе;
2-й этап — создание более сложных функционально законченных устройств (счетчиков, регистров, дешифраторов, полусумматоров) с числом элементов в корпусе от 50 до 500;
3-й этап — разработка сложных функциональных устройств с уровнем интеграции от 500 до 1000 элементов на одном кристалле.
Дальнейшее развитие интегральных схем продолжается в направлении роста степени интеграции, быстродействия, помехоустойчивости и снижения потребляемой мощности.
Условные обозначения интегральных схем отражают их принадлежность к классам, группам и сериям. В серию объединяют схемы по технологическому и конструктивному признакам. Она представляет собой набор схем, необходимых для построения устройств.
Условное обозначение интегральных схем включает в себя следующие элементы:
цифру, соответствующую их группе (1,5,7 — полупроводниковые; 2, 4, 6, 8 — гибридные; 3 — пленочные, керамические);
три цифры (от 0 до 999) порядкового номера разработки серии микросхемы;
две буквы, указывающие подгруппу и вид микросхемы в соответствии с ее функциональным назначением;
условный номер разработки микросхемы, соответствующий ее функциональному признаку в данной серии.
Условное обозначение интегральных микросхем, используемых в широко применяемых устройствах, начинается с буквы К. Следующие два элемента обозначения соответствуют серии микросхемы. Например, К155ЛА1 — это полупроводниковая микросхема широкого применения с порядковым номером разработки 55, функциональным назначением ЛА и условным номером разработки по функциональному признаку 1.
Классификация микросхем по функциональному признаку приведена в специальных справочниках. Так, ЛМ означает логический элемент И; ЛЛ-ИЛИ; ЛН-НЕ; ЛА-И-НЕ; ЛЕ-ИЛИ-НЕ.
Ранее в системах автоматики и телемеханики применяли логические элементы серии «Логика-Т». Однако по надежности, нагрузочной способности, помехозащищенности, функциональным возможностям и некоторым другим показателям они не соответствуют современным требованиям.
В целях улучшения показателей логических элементов разработана и внедрена в производство серия элементов «Логика-И» на базе интегральных микросхем типа К511 с повышенными помехозащищенностью и быстродействием.
Для реализации различных алгоритмов управления в составе серии «Логика-И» применены следующие элементы: логические И-101 ...И-112; И-122, И-123; цифровые И-113...И-121; функциональные И-201...И-209; времени И-301 ...И-302; усилительные И-401... И-406. Напряжение питания этой серии 15 В, потребляемая мощность 0,1... 1 Вт. Напряжение сигнала, соответствующего логическому нулю, на входе до 6 В, на выходе до 1,5 В. Напряжение сигнала, соответствующего логической единице, на входе более 8 В, на выходе более 12 В.
В серии «Логика-И» логическая функция ИЛИ может быть реализована с помощью элемента И-105, который имеет две схемы ИЛИ на четыре входа (4ИЛИ); функция И — с помощью элемента И-102, имеющего две схемы 4И; функция НЕ — с помощью элемента И-107, имеющего две схемы НЕ. Незадействованные выходы схем элементов подключаются к шине питания 15 В или объединяются с рабочими выходами. Входы неиспользованных схем элементов подключаются к нулевой шине.
Для реализации функции ИЛИ —НЕ используется элемент И—108, имеющий четыре схемы на два входа ИЛИ —НЕ.
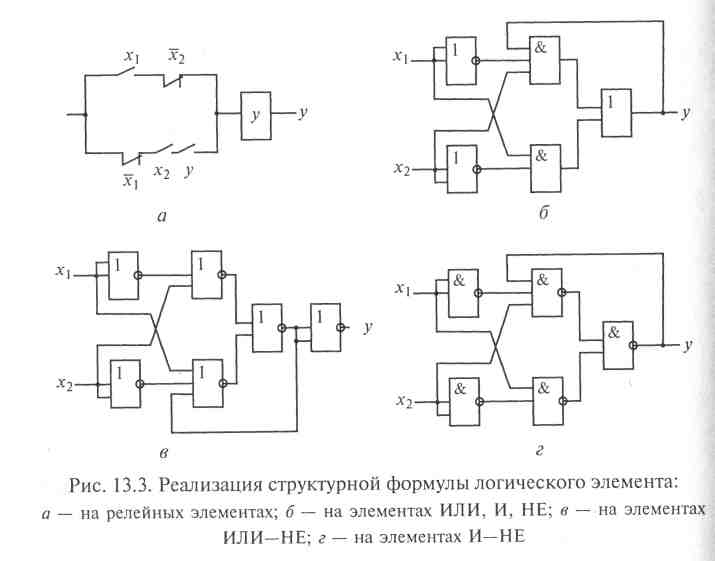
Для перехода из базисов И, ИЛИ, НЕ в базис ИЛИ —НЕ или в базис И —НЕ выполняется преобразование логической формулы с использованием двойного отрицания.
Пример. Преобразование логической формулы для перехода из базисов И, ИЛИ, НЕ соответственно в базис ИЛИ —НЕ и базис И-НЕ:
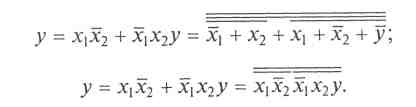
Схемы, построенные по этим формулам, показаны на рис. 13.3.