

8.4. Сервоприводы с электромагнитными муфтами
В сервоприводе с электромагнитными муфтами для вращения выходного вала используется энергия вращающегося с постоянной скоростью двигателя. Для этой цели часто применяют наиболее простой, дешевый и широко распространенный трехфазный асинхронный двигатель.
В схеме сервопривода с электромагнитными муфтами двигатель работает непрерывно, а по управляющему сигналу с его валом соединяется выходной вал.
Схема конструкции сервопривода с муфтами представлена на рис. 8.11. Работает она следующим образом. Двигатель 1 через редуктор 2 вращает шестерни 3, а следовательно, и связанные с ними диски 4 электромагнитных муфт входной стороны. Пара дисков 5 муфт выходной стороны расположена соосно с дисками 4 муфт входной стороны.
Все диски выполнены из магнитомягкого материала. В полостях корпусов дисков 4 уложены обмотки 6 электромагнитов. Входными сигналами электромагнитных муфт (ЭММ) являются токи в обмотках электромагнитов.
При отсутствии входного сигнала между дисками 5 и 4 сцепления нет, и они не вращаются. При подаче тока в ЭММ1 ее диски 4 и 5 намагничиваются, и диск 5, имеющий свободу движения в осевом направлении, притягиваясь к диску 4, вступает в сцепление с ним через специальные фрикционные кольца. Вращение шестерни 3 передается шестерне 8 и на выходной вал 9. При выключении тока пружина 7 отжимает диск 5 от диска 4, и сцепление нарушается.
При подаче входного сигнала в ЭММ2 рабочий процесс протекает аналогично, только выходной вал в этом случае будет вращаться в другую сторону.
Кроме рассмотренной конструкции (с фрикционными дисками) существуют электромагнитные порошковые муфты. В таких муфтах промежуток между ведущей и ведомой частями механизма заполняется специальной ферромагнитной массой, состоящей из частиц карбонильного железа, взвешенных в масле либо смешанных с порошком графита или талька. При включении электромагнита ферромагнитная масса оказывается в магнитном поле; частицы железа, располагаясь по силовым линиям поля, образуют 11епочки. Масса как бы загустевает и осуществляет сцепление между ведущей и ведомой частями механизма.
Когда магнитное поле снимается, на ведомую часть механизма передается только малый момент от трения в ненамагниченной массе. Сцепления в этом случае практически нет.
Сервопривод с электромагнитными муфтами имеет хорошие динамические свойства при разгоне, так как вращающийся двигатель и ведущие шестерни в момент подключения нагрузки имеют большой запас кинетической энергии. В момент отключения сцепление может сохраняться некоторое время за счет трения и оставшегося намагничивания. Для исключения запаздывания при отключении применяют торможение специальными тормозными устройствами.
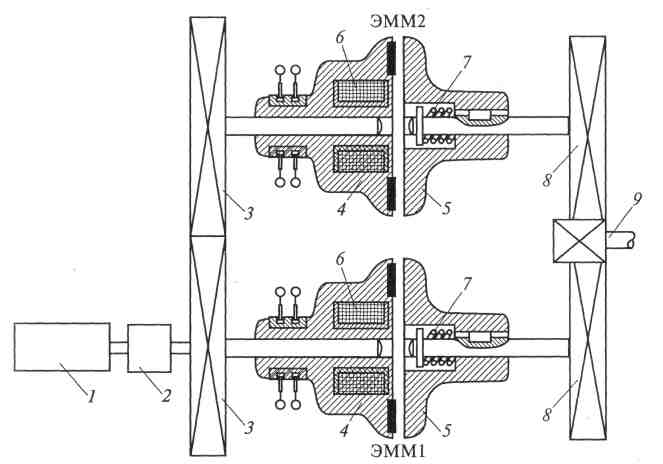
Рис. 8.11. Схема конструкции сервопривода с электромагнитными муфтами ЭММ1 и ЭММ2:
/ — двигатель; 2 — редуктор; 3, 8 — шестерни; 4 — диски муфт входной стороны; 5 — диски муфт выходной стороны; 6 — обмотки электромагнитов; 7 — пружины; 9 — выходной вал
Включение электромагнитов муфт осуществляется контактами реле.
Статическая характеристика сервоприводов с электромагнитными муфтами соответствует показанной на рис. 8.1.