

Контрольные вопросы
Поясните схему и назначение основных элементов типовой промышленной САУ.
В чем состоит отличие укрупненной схемы САУ от типовой промышленной схемы?
Как изменяется работа САУ при наличии отрицательной и положительной обратных связей?
Для чего в САУ используются отрицательная и положительная обратные связи?
Как включается регулятор в САУ?
Какие виды регуляторов используются в промышленных САУ?
Что такое параметры настройки регулятора?
Каковы графики процессов регулирования параметров статического объекта в системах с П-, И-, ПИ- и ПИД-регуляторами?
Глава 12 анализ устойчивости и качества работы сау
12.1. Понятие устойчивости сау
В САУ (см. рис. 1.12), работающих по отклонению (по принципу И.И.Ползунова), регулятор изменяет управляющий сигнал только после отклонения регулируемого параметра от заданного значения. Следовательно, он должен не только компенсировать возмущающее воздействие, но и свести к нулю отклонение регулируемого параметра от заданного значения, т. е. регулятору предстоит форсированная работа. При этом возможны следующие варианты.
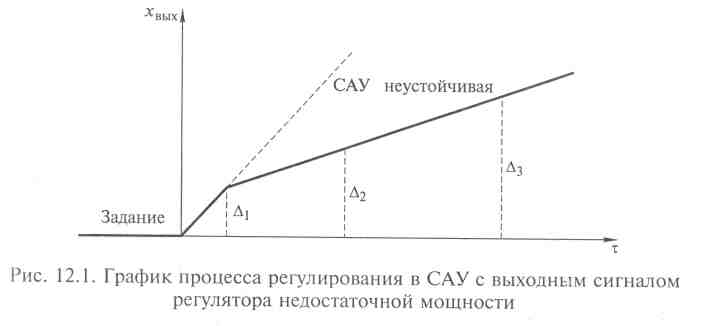
Регулятор вырабатывает управляющий сигнал недостаточной мощности. При этом скорость нарастания отклонения регулируемого параметра от заданного значения уменьшается, но само отклонение продолжает расти. График процесса регулирования — изменения во времени выходного сигнала системы после подачи на нее возмущающего воздействия в этом случае будет расходящийся, а работа САУ — неустойчивой (рис. 12.1).
Регулятор вырабатывает управляющий сигнал избыточной мощности, который не только компенсирует возмущающее воздействие и сводит к нулю отклонение регулируемого параметра от заданного значения, но и вызывает новое отклонение, противоположное по знаку и большей амплитуды (рис. 12.2). График
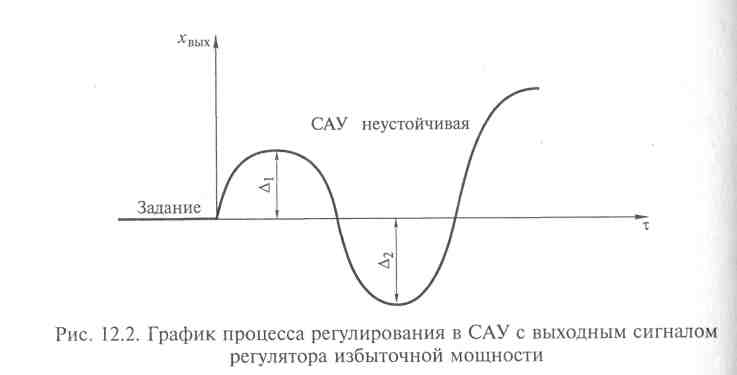
процесса регулирования в такой САУ также будет расходящийся (расходится с заданием), а работа САУ — неустойчивой.
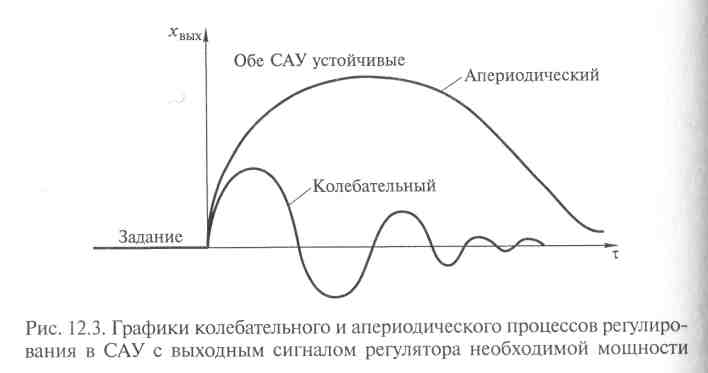
3. Регулятор вырабатывает управляющий сигнал необходимой мощности. При этом регулируемый параметр возвращается к заданному значению или плавно (при апериодическом процессе регулирования), или через колебания уменьшающейся амплитуды (при колебательном процессе регулирования). Графики процессов регулирования в такой САУ — сходящиеся, а работа САУ — устойчивая (рис. 12.3).
12.2 Показатели качества работы сау
Значения показателей качества работы системы легко определяются по графику процесса регулирования устойчивой САУ. По одному из показателей качества — статической ошибке можно судить о принципиальном различии статических систем, в которых Δстат ≠0, и астатических, в которых Астат = 0.
На рис. 12.4 приведен график процесса регулирования в статической САУ, а на рис. 12.5 — в астатической.
Статическая ошибка Δстат — это разность значений регулируемого параметра в состояниях исходного и конечного (после окончания процесса регулирования) равновесия системы.
В астатической системе статическая ошибка равна нулю, т.е. такая система после окончания процесса регулирования возвращается в состояние исходного равновесия.
Динамическая ошибка Δдин — это максимальное в процессе регулирования отклонение регулируемого параметра от конечного состояния равновесия.
В астатических САУ конечное и исходное состояния равновесия совпадают с заданием, поэтому в них динамическая ошибка равна максимальному отклонению параметра в процессе регулирования (см. рис. 12.4 и 12.5).
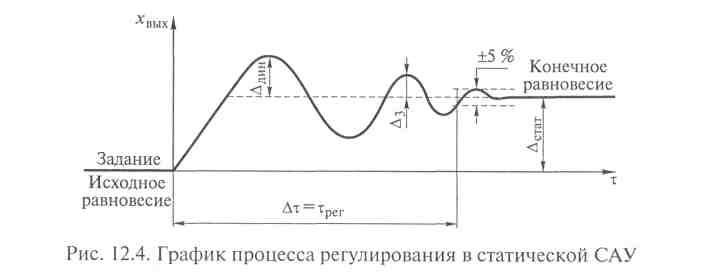

Время регулирования τрег — это отрезок времени с момента подачи в замкнутую САУ возмущающего воздействия до момента, по истечении которого регулируемый параметр в состоянии конечного равновесия или отличается от заданного значения не более чем на ± 5 %. Если заданное значение равно нулю (как на рис. 12.4 и 12.5), то ± 5 % берется от значения динамической ошибки.
Перерегулирование σ — это динамическая ошибка, отнесенная к номинальному значению регулируемого параметра в процентах.
Так как использование динамической ошибки, имеющей размерность регулируемого параметра (градус, метр, микрон и т.д.), не всегда удобно (например, динамическая ошибка в ±2°С для уровня температуры в 1000 °С — маленькая, а для температуры тела человека (36,6 °С) — большая), перерегулирование вычисляют по формуле

Степень затухания ψ — это показатель качества, который характеризует, на сколько процентов уменьшается амплитуда выходного сигнала системы за один период колебаний.
Степень затухания определяется по формуле
![]()
где Δ3 — амплитуда колебаний третьего периода (см. рис. 12.4 и 12.5).
Если Δ3 = 0, то ψ = 100 %.
Обобщенный интегральный среднеквадратичный показатель качества J определяется интегралом (площадью подинтегральной фигуры) изменения в процессе регулирования выходного сигнала системы за период времени регулирования:
Здесь Δхвых берется в квадрате, чтобы можно было просуммировать как положительные, так и отрицательные отклонения выходного сигнала.
Естественно, чем меньше динамическая, статическая ошибки и время регулирования, тем меньше показатель </, а следовательно, выше качество работы САУ.