

10.2. Сложные соединения звеньев
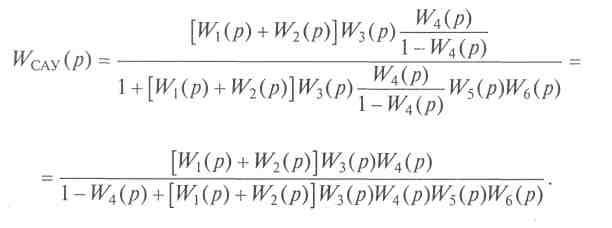
На рис. 10.5 изображена схема сложного соединения звеньев в САУ, на которой нетрудно увидеть типовые соединения. Первое и второе звенья здесь объединены в блок I с параллельно-согласованным соединением, пятое и шестое — в блок III с последовательным соединением. В блок II выделено четвертое звено, охваченное собственной положительной обратной связью. Условно можно принять, что в эту обратную связь включено пропорциональное звено с коэффициентом усиления, равным единице. Запишем передаточные функции выделенных блоков:
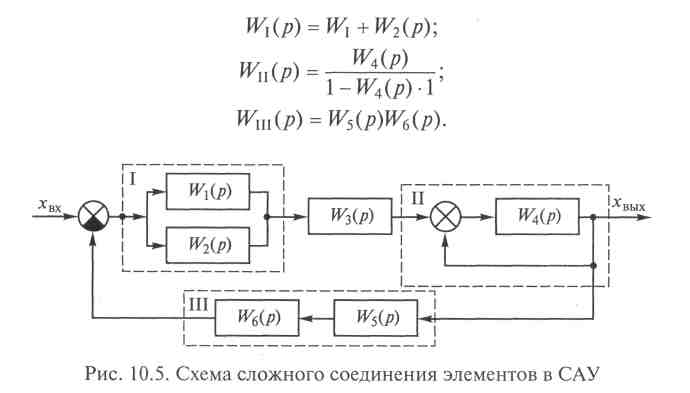
В свою очередь, первый блок, третье звено и второй блок соединены последовательно, а третий блок включен в цепь отрицательной обратной связи. Используя приведенные ранее формулы, запишем передаточную функцию всей САУ:
10.3. Аппроксимация сложных объектов совокупностью нескольких типовых звеньев
Пример 1. Предположим, что на действующем объекте получена экспериментальная кривая разгона, показанная на рис. 10.6.
По этой кривой разгона видно, что сначала на выходе объекта имеет место чистое (транспортное) запаздывание — τтрзап, а затем выходной сигнал объекта изменяется как выходной сигнал апериодического звена 2-го порядка. Известно, что определение коэффициентов Т1 и Т2 в передаточной функции апериодического звена 2-го порядка — довольно сложная процедура.
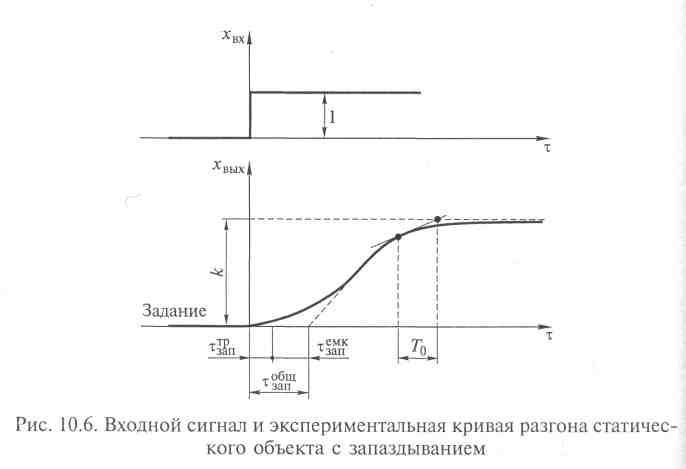
Поэтому на практике часто выполняют следующее упрощение: к точке перегиба кривой разгона апериодического звена 2-го порядка проводят касательную и получают на оси времени отрезок τемкзап, называемый емкостным запаздыванием; дальнейшее изменение выходного сигнала объекта аппроксимируют апериодическим звеном, коэффициенты передаточной функции которого легко определить по кривой его разгона (см. описание апериодического звена).
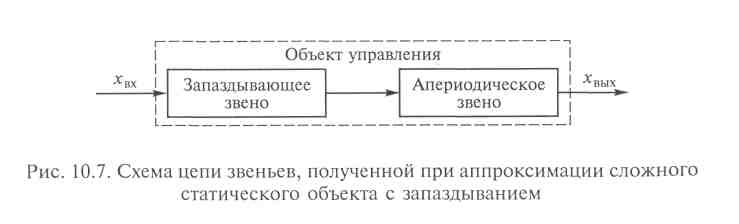
Таким образом, сложный объект в этом случае заменяется (аппроксимируется) цепью из двух последовательно соединенных звеньев: запаздывающего с общим запаздыванием τобщзап= τтрзап + τемкзап и апериодического (рис 10.7).
Передаточная функция данного сложного объекта будет иметь вид
Все коэффициенты передаточной функции легко определить по экспериментальной кривой разгона, показанной на рис. 10.6. Объект в данном случае называется статическим объектом с за-

По этой кривой разгона видно, что сначала на выходе объекта имеет место транспортное запаздывание — τтрзап, а затем кривая разгона переходит в прямую линию с углом наклона α к оси абсцисс — оси времени.
Продолжив до пересечения с осью времени эту прямую, получим отрезок времени, который так же, как в примере 1, называют емкостным запаздыванием - τемкзап. Замена изогнутого участка экспериментальной кривой разгона на две прямые линии не приводит к большим погрешностям при аппроксимации.
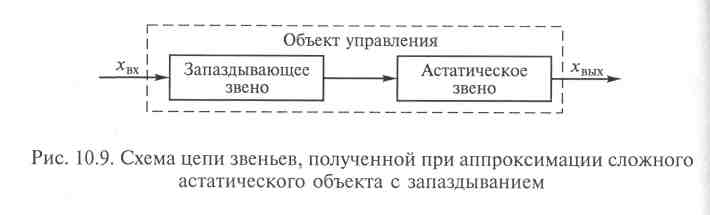
Следовательно, сложный объект в этом случае можно заменить цепью из двух последовательно соединенных звеньев: запаздывающего — с общим запаздыванием τобщзап= τтрзап + τемкзап и астатического (рис. 10.9).
Передаточная функция данного сложного объекта будет иметь вид
Коэффициент Т полученной передаточной функции легко определить через тангенс угла а: Т= 1/lgα.
Объект в данном случае называется астатическим объектом с запаздыванием. (Запаздывание транспортное или емкостное, а часто и то, и другое, присуще объектам большой емкости или массы.)