

8.5. Шаговые сервоприводы
Шаговый сервопривод был разработан для автоматических систем программного управления, в которых программа перемещений записывается в виде импульсов, дискретных во времени. При этом число импульсов соответствует требуемому числу единичных перемещений, а частота их следования — скорости перемещения.
Для шагового электропривода каждый такой импульс — это управляющий сигнал; он отрабатывает его, поворачивая ротор на определенный (единичный) угол (шаг). Значение единичного угла поворота определяется только конструкцией двигателя и не зависит ни от амплитуды управляющего сигнала, ни от его продолжительности.
На рис. 8.12 показана конструкция шагового двигателя, цилиндрический вытянутый статор 1 которого имеет четное число полюсов 2, равномерно расположенных по окружности. По длине статора полюсы разделены на три секции — А, Б, В, имеющие независимое друг от друга питание обмоток. Каждая смежная пара полюсов в одной секции имеет разную полярность. В роторе двигателя столько же секций и полюсов, сколько их в статоре, но полюса его секций сдвинуты на одну треть шага относительно соседней секции. Например, когда полюса секции А ротора расположены напротив полюсов статора, то полюса секции Б сдвинуты относительно них на 1/3 шага по часовой стрелке, а полюса секции В — на 2/3 шага в ту же сторону или, что то же самое, на 1/3 шага против часовой стрелки (рис. 8.13).
Если при таком положении ротора подать питание к полюсам статора секции А, то ротор останется на месте, так как его положение соответствует минимальному магнитному сопротивлению магнитопровода.
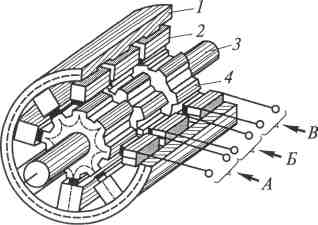 Рис.
8.12. Конструкция шагового двигателя:
Рис.
8.12. Конструкция шагового двигателя:
1 — статор; 2 — полюс статора; 3 —
вал двигателя; 4 — полюс ротора;
А, Б, В — секции статора
I I I
Секция
А Секция
Б Секция
В
Рис.
8.13. Схемы расположения полюсов ротора
и статора в секциях Д Б,
В
шагового двигателя
Если подать питание
на обмотки полюсов статора секции Б,
то ротор
повернется против часовой стрелки на
1/3 межполюсного угла и остановится в
таком положении. Когда полюсы секции
Б ротора
будут под полюсами статора, сопротивление
магнитопровода будет минимальным.
Выполненный ротором поворот на 1/3
межполюсного угла — это один шаг
двигателя.
Если после подачи
управляющего импульса в секцию Б
статора
следующий импульс подать в секцию В
статора, то
ротор сделает еще один шаг против
часовой стрелки; если же после секции
Б возбудить
секцию А, то
шаг ротором будет сделан в противоположном
направлении.
Таким образом,
подача импульсов в секции статора в
порядке А,
Б, В соответствует
шагам ротора против часовой стрелки,
а в порядке А,
В, Б — шагам
ротора в противоположном направлении
(рис. 8.14).
Импульсы питания обмоток статора формируются специальными кольцевыми схемами с использованием реле, тиратронов или полупроводниковых элементов. Скорость шаговых двигателей может достигать 104 шагов в секунду при плавном ее повышении и обычно порядка 102 шагов в секунду при реверсировании (или так называемой приемистости).
Динамические свойства лучше у шаговых двигателей малых мощностей, поэтому в быстродействующих системах программного управления их используют в качестве первичного сервоприводного устройства, преобразующего импульсный ход в перемещение, а затем включают усилитель перемещения (обычно гидравлический), выполняющий перемещение нагрузки.