

12.5. Вывод характеристического уравнения замкнутой системы из передаточных функций объекта и регулятора
Для исследования замкнутой системы на устойчивость необходимо знать математические модели — передаточные функции всех элементов САУ. Для укрупненной структурной схемы САУ — это передаточные функции объекта и регулятора. Выясним, как, используя передаточные функции объекта и регулятора, определить характеристическое уравнение замкнутой системы, через корни которого можно оценить устойчивость проектируемой САУ. Это можно сделать двумя способами.
Первый способ. Запишем передаточную функцию замкнутой САУ через передаточные функции объекта и регулятора с параллельно-встречным соединением звеньев с отрицательной обратной связью (см. рис. 10.3 и 11.2):
![]()
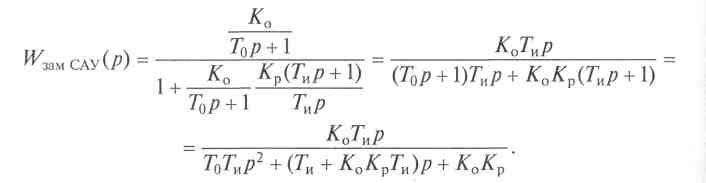
Теперь, если после проведенных алгебраических преобразований знаменатель передаточной функции замкнутой САУ приравнять нулю, получим характеристическое уравнение замкнутой системы. Следует отметить, что последнее выражение есть передаточная функция замкнутой системы с возмущающим воздействием Х{ (см. рис. 11.2) со стороны регулирующего органа. В общем виде она будет иметь вид
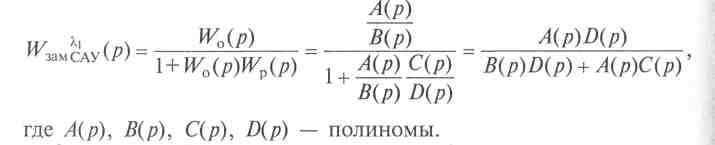
запишем в общем виде передаточную функцию замкнутой системы с возмущающим воздействием λ1 (см. рис. 11.2) со стороны задатчика:

Сравнив знаменатели![]() ,
можно сделать вывод, что характеристические
уравнения замкнутых САУ с возмущающим
воздействием λ1
со стороны
регулирующего органа и возмущающим
воздействием λ3
со стороны
задатчика будут одинаковыми.
,
можно сделать вывод, что характеристические
уравнения замкнутых САУ с возмущающим
воздействием λ1
со стороны
регулирующего органа и возмущающим
воздействием λ3
со стороны
задатчика будут одинаковыми.
Недостаток рассмотренного способа вывода характеристического уравнения замкнутой САУ состоит в том, что при алгебраических преобразованиях четырехэтажной дроби передаточной функции легко ошибиться и, следовательно, получить с ошибками после преобразований знаменатель обычной дроби. Этого недостатка лишен другой способ.
Второй способ. С помощью передаточных функций объекта и регулятора запишем передаточную функцию выбранной разомкнутой системы:
![]()
Затем суммируем знаменатель и числитель полученной обычной дроби и полученную сумму приравниваем к нулю. В результате получим характеристическое уравнение замкнутой системы:
![]() или
или
![]()
Запишем передаточную функцию разомкнутой САУ в общем виде:
![]()
Выражение В(р)D(р) + А(р)С(р) = 0 и есть характеристическое уравнение замкнутой САУ.
Однако после получения характеристического уравнения замкнутой САУ возникают новые трудности. Дело в том, что современная математика не позволяет решать в общем виде алгебраические уравнения (а характеристические уравнения замкнутой САУ — это алгебраические уравнения) выше третьего порядка (в которых неизвестное р в третьей степени), тогда как для реальных промышленных систем, состоящих из множества элементов (см. рис. 11.1), часто требуется решение уравнений четвертого, шестого и выше порядков. Поэтому в ТАУ разработаны косвенные методы (ТАУ — это практичная, инженерная теория), позволяющие определить знаки всех корней характеристического уравнения замкнутой САУ без решения самого уравнения. Эти методы назвали критериями устойчивости.