

Глава 8 исполнительные устройства
8.1. Общие характеристики исполнительных устройств
Исполнительным устройством системы автоматического управления в большинстве случаев является привод, перемещающий регулирующий орган в соответствии с сигналом регулирующего воздействия.
В качестве исполнительных устройств (серводвигателей) в системах автоматики чаще всего применяются электродвигатели. Менее распространены гидравлический и пневматический сервоприводы.
Серводвигатель преобразует сигнал управления в перемещение. При этом перемещение может выполнятся как с постоянной или переменной скоростью, так и в импульсном режиме.
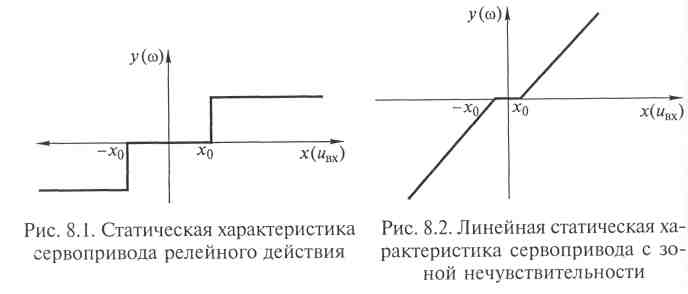
В первом случае перемещение начинается при некотором отклонении входного сигнала от нулевого значения, т.е. при ± х0 (рис. 8.1). При этом значение скорости постоянно и устанавливается скачком.
Во втором случае скорость перемещения изменяется плавно, пропорционально управляющей величине. Причем серводвигатель имеет зону нечувствительности (рис. 8.2), ограниченную значениями ± х0.
перемещение вала серводвигателя на определенную величину. Это перемещение называется шагом, а привод такого типа называется шаговым. Скорость перемещения в этом случае переменна и пропорциональна частоте следования управляющих импульсов.
Для осуществления каждого из названных режимов перемещения с помощью электрических двигателей используются специальные схемы управления, которые также относятся к устройствам сервопривода.
8.2. Электрические серводвигатели
Серводвигатели являются разновидностью электропривода; принцип их действия тот же, что и у силовых двигателей, но работают они в специфических условиях, определяющих некоторые специальные требования к их конструкции и схемам включения.
Серводвигатель в отличие от обычного приводного устройства непрерывно работает в переходных режимах. Следовательно, чтобы не вносить в тракт автоматического управления нежелательных запаздываний, серводвигатель должен быть быстродействующим, т.е. он должен быстро разгоняться, быстро тормозиться, быстро обрабатывать команды реверсирования. У двигателей, работающих в режиме плавного регулирования, желательно наличие возможно большего диапазона изменения скоростей.
Для уменьшения инерции ротор такого электродвигателя делают удлиненным и небольшого диаметра.
Требуемая скорость перемещения нагрузки обычно во много раз меньше скорости вращения вала серводвигателей, поэтому они, как правило, работают с редукторами и часто объединяются с ними конструктивно. Наличие редуктора, снижая до минимума влияние момента сопротивления нагрузки, также повышает быстродействие серводвигателя.
Специальные схемы включения позволяют повысить пусковой момент серводвигателя постоянного тока и тем самым повысить скорость его разгона.
Электродвигатели постоянного тока с независимым возбуждением
В схеме, показанной на рис. 8.3, электродвигатель управляется по цепи якоря. Входными величинами электродвигателя являются напряжение на его щетках ивх или ток в цепи якоря iя. В качестве выходных величин могут быть приняты момент на валу двигателя М, угловая скорость ω и угол поворота вала α.
В установившемся режиме угловая скорость электродвигателя пропорциональна входному напряжению, ω = kUвх.
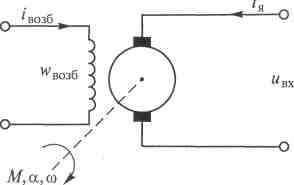
Рис. 8.3. Схема серводвигателя постоянного тока с независимым возбуждением
Поскольку двигатель работает в переходных режимах, необходимо учитывать и его динамические свойства.
Инерционность серводвигателей малой мощности характеризуется постоянными времени порядка 10 -1... 10 -5 с, а большой мощности — порядка 0,1... 1 с.
Выбор схемы управления серводвигателя постоянного тока с независимым возбуждением в значительной степени зависит от его мощности. Для электродвигателей малой мощности целесообразно использование плавного управления, улучшающего общие характеристики автоматической системы, а для более мощных электродвигателей — использование релейных схем, с помощью которых проще осуществлять коммутацию больших токов.
Для изменения направления вращения электродвигателя постоянного тока достаточно изменить направление тока только в обмотке якоря или только в обмотке возбуждения. Управление посредством изменения тока возбуждения применяется сравнительно редко, так как при этом сильно возрастает электромагнитная постоянная времени, т.е. инерционность электродвигателя, а ток якоря даже у небольших электродвигателей постоянного тока обычно довольно большой, поэтому наибольшее распространение получили схемы реверсирования с помощью реле. Повышение чувствительности схемы обеспечивается применением электронных реле.
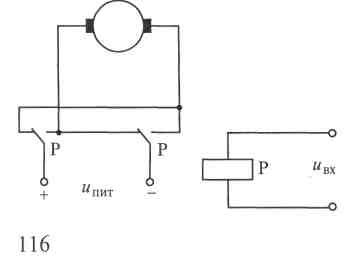
На рис. 8.4 показана схема реверсирования серводвигателя посредством поляризованного реле. В этой схеме напряжение ивх, соответствующее по знаку входной величине хвх, поступает в обмот-ку реле (Р), контакты которого, переключаясь из одного своего положения в другое, изменяют направление тока в якоре электродвигателя.
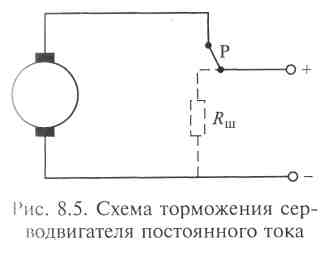

При выключении электродвигатель останавливается не сразу вследствие наличия инерции. В случае необходимости быстрой остановки электродвигателя постоянного тока с независимым возбуждением после выключения (путем размыкания цепи якоря) обмотку его якоря замыкают на небольшое шунтирующее сопротивление Rш, показанное на рис. 8.5 пунктиром.
Для плавного увеличения или уменьшения скорости применяется мостовая схема включения электродвигателей (рис. 8.6) как постоянного, так и переменного тока (в последнем случае напряжение с мостовой схемы поступает на обмотку статора).
Обмотка якоря двигателя постоянного тока в этом случае питается напряжением, снимаемым с диагонали моста, образованного потенциометрами R1 и R2. Это напряжение пропорционально перемещению движков этих потенциометров, а его полярность зависит от направления их перемещения.