

Электроконтактные датчики
Электроконтактные датчики перемещения имеют релейную характеристику и применяются в основном для контроля размеров деталей.
Электроконтактные датчики бывают однопредельные (с одним контактом) и двухнедельные (с двумя контактами). Однопредельные датчики применяются для контроля размера детали по допуску одного знака. Двухнедельные датчики позволяют контролировать размер детали по допускам «+» и «-». Электроконтактные датчики измеряют не фактические размеры деталей, а только разброс их значений. Например, при контроле диаметра цилиндрической детали воспринимающий стержень (измерительный наконечник) смещается относительно корпуса датчика, воспринимая разность между максимальным и минимальным диаметрами.
На рис. 4.7 представлена схема конструкции двухнедельного электроконтактного датчика.
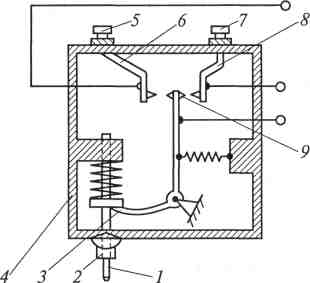
1 — воспринимающий стержень; 2 — направляющая гильза; 3 — двуплечный рычаг; 4 — корпус; 5, 7 — настроечны винты; 6, 8, 9 — контакты
Датчики, предназначенные для точных измерений (с погрешностью не более 0,01 мм), рассчитаны на очень малый ток в цепи контактов (порядка десятых долей миллиампера), поэтому их включают с усилительными электронными схемами. Датчики для более грубых измерений могут включаться непосредственно в цепи обмоток реле.
Путевой выключатель
Путевой выключатель (рис. 4.8) — это предельный датчик перемещения. Он применяется в электрических схемах промышленной автоматики для подачи команд о начале перемещения какого-либо подвижного узла или проходе определенного участка пути. Путевой выключатель представляет собой систему из нескольких
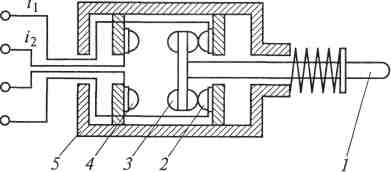
Рис. 4.8. Схема конструкции (а) и статические характеристики (б) путевого выключателя:
воспринимающий стержень; 2, 4 — неподвижные контакты; 3 — подвижный контакт; 5 — корпус
пар неподвижных и подвижных контактов, которые непосредственно связаны с перемещающимся узлом.
Точность срабатывания такого датчика по отношению к перемещению невелика — от 10 до 2 мм в зависимости от типа выключателя.
4.3. Датчики скорости Центробежные датчики скорости
Схема конструкции центробежного датчика скорости пред став-юна на рис. 4.9.
На двух муфтах шарнирно закреплены грузы; с увеличением скорости вращения грузы расходятся, сжимая пружину, и поднимают
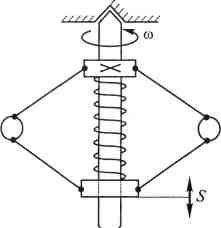
Перемещение муфты является выходной
величиной датчика, а его входная величина - угловая скорость. Для преобразования выходной величины в электрический сигнал к подвижной муфте можно присоединить любой датчик перемещения.
Рис. 4.9. Схема конструкции центробежного датчика
Тахогенераторы
Тахогенераторы — это миниатюрные генераторы постоянного или переменного тока с независимым возбуждением, осуществляемым от электромагнитов или постоянных магнитов. На рис. 4.10 представлена схема конструкции тахогенератора постоянного тока, в котором напряжение, снимаемое с обмоток якоря, пропорционально скорости вращения якоря.
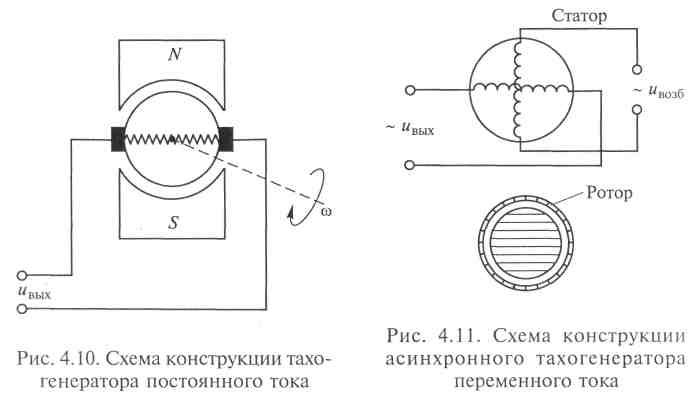
В асинхронном тахогенераторе переменного тока (рис. 4.11) две обмотки, сдвинутые по оси на 90°, расположены на статоре. Ротор представляет собой алюминиевый тонкостенный цилиндр, вращающийся в зазоре между статором и неподвижным сердечником, набранным из стальных пластин. Одна из обмоток статора питается током возбуждения; под влиянием поля, создаваемого этой обмоткой, во вращающемся роторе наводятся токи. Магнитный поток, создаваемый этими токами, при вращении ротора пересекает вторую обмотку статора и наводит в ней ЭДС, пропорциональную скорости вращения.