

4.2. Датчики перемещений Потенциометрические датчики
Потенциометрический датчик (рис. 4.1), являющийся датчиком линейных или угловых перемещений, представляет собой реостат с подвижным контактом — щеткой, включенной по схеме
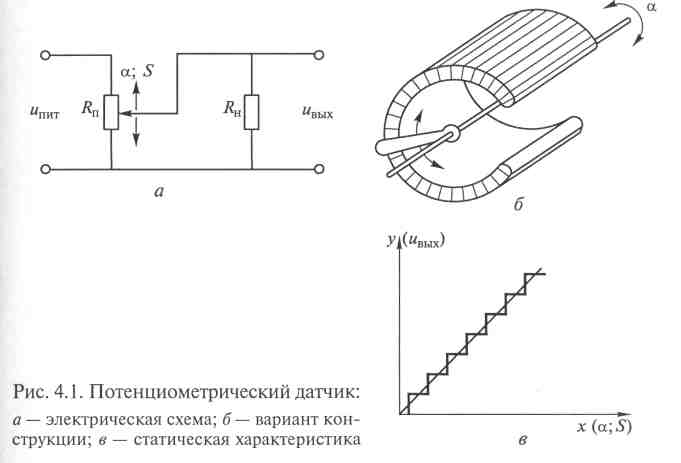
потенциометра. Перемещение подвижного контакта такого датчика преобразуется в напряжение, снимаемое со щетки и одной клеммы обмотки потенциометра (см. рис. 4.1, а).
Характеристика потенциометра линейна, если сопротивление нагрузки значительно больше его сопротивления.
Динамические свойства потенциометра также зависят от его нагрузки; при активной нагрузке он практически безинерционен, а при емкостной и индуктивной нагрузках изменение его выходного сигнала будет отставать от изменения входного сигнала, так как динамические процессы в электрических цепях с реактивным сопротивлением протекают не мгновенно.
Чувствительность потенциометрических датчиков при измерении перемещений составляет 3...5 В/мм.
Конструкции потенциометра разнообразны. Наиболее распространен потенциометр с каркасом цилиндрической формы (см. рис. 4.1, б), которая обеспечивает небольшие его габариты и позволяет снизить усилия, необходимые для перемещения щетки, а следовательно, уменьшить зону нечувствительности, что очень важно при измерении малых перемещений.
Каркасы потенциометров делают из пластмасс, керамики, оксидированного алюминия, а обмотки — из сплавов с высоким удельным сопротивлением (константана, сплавов платины, золота). Для намотки используется проволока малого диаметра (до сотых долей миллиметра), так как чем меньше диаметр проволоки, тем меньше ступенчатость статической характеристики (см. рис. 4.1, в).
Щетки потенциометров изготовляют из сплавов серебра, платины, иридия, палладия и др.
Применяются и потенциометры с каркасами другой формы, например, если надо произвести измерения большого линейного перемещения с большой точностью, — прямолинейные, большой длины.
Достоинства потенциометрического датчика — простота конструкции и схемы, малые габаритные размеры и масса; недостаток — наличие скользящего контакта, который, во-первых, снижает надежность, а во-вторых, ограничивает срок его эксплуатации, так как со временем происходит истирание проволоки и характеристика потенциометра меняется.
Индуктивные датчики
Принцип действия индуктивного датчика состоит в преобразовании перемещения подвижной части его магнитопровода в изменение индуктивности катушек. Применяется такой датчик главным образом для точных измерений малых перемещений.
Схемы конструкций простого и дифференциального индуктивных датчиков представлены на рис. 4.2, а, б.
Измеряемое перемещение предмета 1 вызывает перемещение подвижной части магнитопровода 2, изменение воздушного зазора δ и в конечном счете изменение индуктивности в обмотке 3. (В дифференциальном датчике изменяются индуктивностиI обеих обмоток 3.) Обмотки включены в мостовую схему переменного тока, поэтому выходной сигнал датчика — разбаланс моста пропорционален входному сигналу — перемещению.
Статическая характеристика датчика представлена на рис. 4.2, в.
Чувствительность индуктивных датчиков может достигать 10 В/мм; линейная область характеристики невелика. Индуктивным датчиком можно измерять перемещения порядка 10 -7 м.
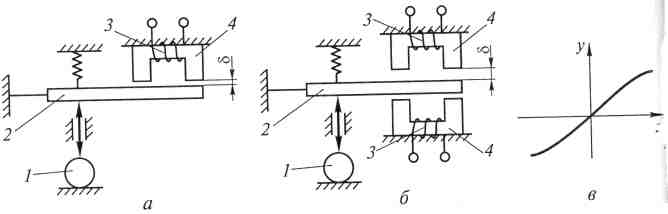
Рис. 4.2. Схемы конструкций простого (а) и дифференциального (б) индуктивных датчиков и их статическая характеристика (в): 1 — перемещающийся предмет; 2 — подвижная часть магнитопровода; 3 — обмотки; 4 — неподвижный магнитопровод