

Контрольные вопросы
Каковы назначение усилителей в составе САУ и их основные характеристики?
Каковы принцип действия и характеристики однотактного магнитного усилителя?
Каковы схема и преимущества двухтактного магнитного усилителя?
В чем заключается принцип действия электромашинного усилителя и какова его статическая характеристика?
Поясните схему и принцип действия электромашинного усилителя с поперечным полем.
Как работает схема усилителя на биполярном транзисторе?
Поясните принцип действия усилителя на полевом транзисторе и его частотную характеристику.
Каковы особенности построения операционных усилителей: универсальных, прецизионных, регулируемых, мощных высоковольтных?
Как используются ОУ в моделировании математических операций?
В чем состоят особенности построения электрометрических и измерительных усилителей?
Каковы принципы построения многокаскадных усилителей?
Каковы принципы построения усилителей мощности и их основные параметры?
Глава 7 переключающие устройства (реле)
7.1. Общие сведения и классификация реле
В системах автоматики и телемеханики одним из наиболее распространенных элементов является реле. Реле — это устройство, которое автоматически осуществляет скачкообразное изменение (переключение) выходного сигнала под воздействием управляющего сигнала, изменяющегося непрерывно в определенных пределах.
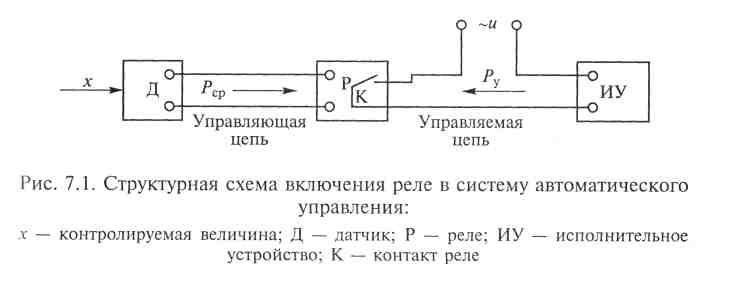
Электрическое реле является промежуточным элементом, который приводит в действие одну или несколько управляемых электрических цепей при воздействии на него определенных электрических сигналов управляющей цепи (рис. 7.1).
Основные параметры реле:
мощность срабатывания Рср — минимальная электрическая мощность, которая должна быть подведена к реле от управляющей цепи для его надежного срабатывания, т. е. приведения в действие управляемой цепи. Эта мощность определяется общими электрическими и конструктивными параметрами реле;
мощность управления Ру — максимальная электрическая мощность в управляемой цепи, при которой контакты реле еще работают надежно. Мощность управления определяется параметрами контактов реле, переключающих управляемую цепь;
допустимая разрывная мощность Рр — мощность в цепи, разрываемой контактами при
определенном токе или напряжении без образования устойчивой электрической дуги, при данном напряжении;
коэффициент управления Ку — величина, характеризующая отношение управляемой мощности к мощности срабатывания реле:
Ky = Py / Pср ≥ 1
время срабатывания tср — интервал времени от момента поступления сигнала из управляющей цепи до момента начала воздействия реле на управляемую цепь. Допустимое значение /ср определяется необходимой быстротой передачи сигнала в управляемую цепь.
Выбор типа реле производится в соответствии со значениями Рср и Ру, так как эти параметры постоянны для отдельных конструкций реле.
Существующие типы реле можно классифицировать по следующим признакам:
назначению — управления, защиты, сигнализации;
принципу действия — электромеханические (электромагнитные, нейтральные, электромагнитные поляризованные, магнитоэлектрические, электродинамические, индукционные, электротермические), магнитные бесконтактные, электронные, триггерные (бесконтактно-электронные), фотоэлектронные, ионные;
измеряемой величине — электрические (тока, напряжения, мощности, сопротивления, частоты, коэффициента мощности), механические (силы, давления, скорости, перемещения, уровня, объема и т.д.), тепловые (температуры, количества теплоты), оптические, силы звука и других физических величин (времени, вязкости и т.д.);
мощности управления — маломощные (Ру ≤ 1 Вт), средней мощности (Ру = 1... 10 Вт), мощные (Ру > 10 Вт);
времени срабатывания — безынерционные (tср ≤ 0,001 с), быстродействующие (tср = 0,001...0,05 с), замедленные (tср = 0,15... 1 с), реле времени (tср> 1 с).
Наиболее распространены электромеханические реле, в которых изменение входной электрической величины вызывает механическое перемещение подвижной части — якоря, приводящее к замыканию или размыканию контактов.