

Глава 6. Редукторы
6.1. Назначение, классификация и применение
в машинах и артиллерийской технике
Редукторы. Редуктор – агрегат с передачами зацеплением, который предназначен для уменьшения угловой скорости вращения выходного вала и увеличения вращающего момента.
Характеристики редукторов каждого типа определяются следующими основными параметрами: кинематической характеристикой – передаточным отношением; иловой характеристикой – вращающим моментом и допускаемой консольной нагрузкой на выходном валу; коэффициентом полезного действия (КПД); размерами и массой.
В приводах выходной вал редуктора соединяется с валом электродвигателя с помощью муфты или привод представляется в виде мотор-редуктора, в котором конструктивно объединены редуктор и электродвигатель. Различают редукторы общего и специального назначения.
Редукторы общего назначения в приводах комплектуются с асинхронными электродвигателями общего применения с синхронной частотой вращения 750, 1000, 1500 и 3000 мин-1 и изготавливаются стандартными по межосевому расстоянию, передаточному отношению и вращающему моменту на выходе.
В редукторах специального назначения с нестандартными параметрами используются стандартные детали (зубчатые колеса, подшипники и т.д.).
В зависимости от типа передач различают зубчатые, червячные, планетарные, волновые и комбинированные редукторы, а по виду колес – цилиндрические и конические. Большинство редукторов выполняют двух- и трехступенчатыми.
Наибольшее применение находят зубчатые и червячные редукторы, а также их комбинации.
Зубчатые редукторы (рис.6.1). Выпускаются одноступенчатые цилиндрические при ί = 2…6,3; даухступенчатые цилиндрические соосной и развернутой схемы с ί = 8…40 (63); трехступенчатые цилиндрические с развернутой схемой расположения колес ί = 45…200; коническо-цилиндрические, где быстроходная ступень коническая передача с круговыми зубьями и ί = 2…4 а тихоходная – цилиндрическая с прямыми или косыми зубьями.

Рис. 6.1
Для уменьшения массы применяют зубчатые цилиндрические редукторы с раздвоенной быстроходной ступенью и трехступенчатые с раздвоенной второй ступенью.
Червячные редукторы (рис.6.2) выпускаются: червячные одноступенчатые с нижним, верхним, боковым горизонтальным и боковым вертикальным расположением червяка, обеспечивающие моменты (на тихоходном валу) 85…2000 Н·м в диапазоне ί = 100…6300.
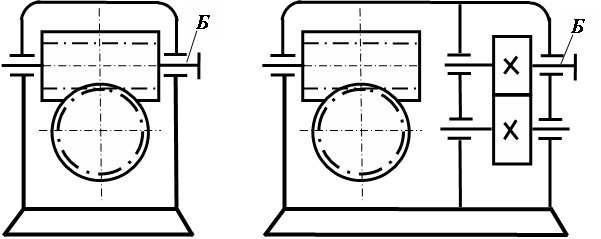
Рис. 6.2
В ряде конструкций применяют двухступенчатые зубчато-червячные редукторы: червячно-цилиндрические или цилиндро-червячные с передаточным отношением до 150. Червячные редукторы отличаются плавностью и бесшумностью работы, но имеют низкий КПД ( η = 0,5…0,8) и высокую стоимость обусловленную применением дорогостоящих материалов (бронза, латунь и др.) и сложностью изготовления.
Зубчатые планетарные и волновые редукторы по конструкции сложнее указанных, но они обеспечивают большие передаточные отношения на одну ступень ί = 15…300, меньший вращающий момент на единицу массы и компактность конструкции.
Широкое применение редуктора нашли в подъемных и поворотных механизмах артиллерийских орудий и боевых машин, например в системах, приведенных в табл. 6.1.