

3.5.2. Геометрия, кинематика, кпд, усилия
Геометрические размеры червяка и колеса определяют по формулам, аналогичным для зубчатых колес. В качестве расчетного модуля принимают осевой модуль червяка m, равный окружному модулю червячного колеса mt, он должен быть стандартным m = р/π. Для определения делительного диаметра червяка d1, используют коэффициент q диаметра червяка.
Значение q ≥ 0,21 z2, и выбирается стандартным.
Размеры червяка:
d1 = mq; ha = m; hf = 1,2m; h = 2,2m;
da1 = d1 + 2ha ; df1 = d1 – 2hf; s = e = 0,5p.
Длина нарезной части червяка – в1 ≥ (11+0,06z2)m.
Угол подъема винтовой линии - γ = arctg(z1/g).
Угол профиля витков червяка - α = αw = 200.
Размеры червячного колеса:
d2 = mz2; da2 = d2 + 2ha;
df2 = d2 – 2hf; c = 0,2m; в2 = 0,75da1 при z1 ≤ 3;
в2 ≤ 0,67 da1 при z1 = 4.
Условный угол обхвата червяка - δ = arcsin [в2/(da1 – 0,5m)].
Угол наклона зубьев - β = γ = 5…200.
Межосевое расстояние передачи
dw = a = 0,5(d1 + d2) = 0,5m(q + z2).
В червячной передаче в отличие от зубчатой окружные скорости червяка υ1 и колеса υ2 не совпадают по величине и направлению (рис.3.16). Поэтому начальные цилиндры передачи в относительном движении скользят, а не обкатываются; передаточное отношение не может быть выражено отношением диаметров d2 и d1. Скорость скольжения
 υs
= √υ21 +υ22
= υ1/cosγ.
(3.47)
υs
= √υ21 +υ22
= υ1/cosγ.
(3.47)
Так как γ< 300, то υ2 < υ1. Скольжение является причиной износа и заедания передач, снижает их КПД.

Рис. 3.16
КПД зацепления определяется по формуле
η3
=
![]() , (3.48)
, (3.48)
где ρ' = arctg f ' – приведенный угол трения;
f ' – приведенный коэффициент трения;
При γ ≤ ρ – передача самотормозящая.
В предварительном расчете можно принимать:
η = 0,7 …0,75 при z1 = 1;
η = 0,75 … 0,85 при z1 = 2;
η = 0,82 …0,95 при z1 = 3, 4.
При выполнении проектировочного расчета скорость скольжения ориентировочно принимается из соотношения υs = (0,02 …0,06)ω1.
Передаточное отношение
ί12 = ω1/ω2 = n1/n2 = z2/z1 = u. (3.49)
При передаче
вращающего момента Т1 в полюсе
зацепления червячной передачи действуют
(рис.3.17): окружная сила
![]() на червяке, численно равная осевой силе
на червяке, численно равная осевой силе
![]() на червячном колесе (
на червячном колесе (![]() ),
),
Ft1 = Fa2 = 2T1/d1; (3.50)
окружная сила
![]() на червячном колесе, численно равная
осевой силе
на червячном колесе, численно равная
осевой силе
![]() на червяке (
на червяке (![]() ).
).
Ft2 = Fa1 = 2T2/d2; (3.51)
радиальная
(распорная) сила
![]() на червяке, численно равная радиальной
силе
на колесе (
на червяке, численно равная радиальной
силе
на колесе (![]() ),
),
Fr1 = Fr2 = Ft2tgα; (3.52)
Нормальное усилие - Fn = Ft2/(cosγ·cosα).
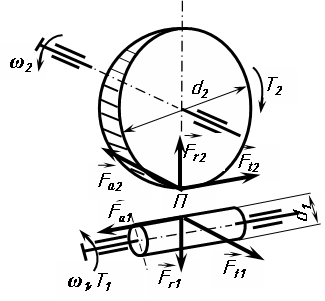
Рис. 3.17
3.5.3. Расчет червячных передач
Основными причинами выхода из строя червячных передач являются: поверхностное разрушение зубьев колеса; заедание и износ зубьев; поломка зубьев колес, главным образом, после их износа.
Таким образом, прочность (контактная и изгибная), износостойкость и противозадирная стойкость являются основными критериями работоспособности передач.
Витки червяка на
прочность не рассчитывают, так как
материал червяка, как правило, значительно
прочнее материала зубьев колес. Для
червяка, нагруженного вращающим моментом
Т и силами
![]() может производиться проверочный расчет
на прочность и жесткость по формулам
сопротивления материалов, рассматривая,
червяк как вал на двух опорах.
может производиться проверочный расчет
на прочность и жесткость по формулам
сопротивления материалов, рассматривая,
червяк как вал на двух опорах.
Основным расчетом, как для закрытых, так и для открытых червячных передач является расчет на контактную прочность зубьев колеса, предотвращающий выкрашивание и заедание. Расчет на изгибную прочность зубьев выполняют как проверочный.
В связи с тем, что при работе червячных передач имеет место большое тепловыделение, для закрытых передач дополнительно производится тепловой расчет.
Условие контактной прочности при стальном червяке и бронзовом зубчатом венце колеса
σН
=
 ≤ [σН ]. (3.53)
≤ [σН ]. (3.53)
При проектировочном расчете определяется межосевое расстояние
аw
= a = (z2/q
+ 1)3 .
(3.54)
.
(3.54)
Условие изгибной прочности
σF = 1,2 KFT2YF/(qz2m3) ≤ [σ]. (3.55)
В формулах: КН = КF = 1,2…1,4 – коэффициент расчетной нагрузки;
YF – коэффициент формы зуба, выбираемый по таблице в зависимости от эквивалентного числа зубьев червячного колеса zυ = z2/cos3γ.
Коэффициент 1,2 вместо 2,0 для зубчатых передач учитывает повышение нагрузочной способности.
Допускаемые напряжения определяются по формулам:
[σН ]= σНОКHL ; [σF] = σFOKFL. (3.56)
где σНО и σFO – пределы контактной и изгибной выносливости при базовом числе циклов нагружения (выбирают по таблице, задавшись скоростью скольжения υs);
KHL и KFL – коэффициенты долговечности ; при большом ресурсе работы КHL= KFL = 1.
Тепловой расчет передачи производится с целью определения температуры нагрева масла и сравнения ее с допускаемой по формуле, получаемой из уравнения теплового баланса
tM
=
 ,
(3.57)
,
(3.57)
где Рвх – мощность на выходном валу, Вт;
η – КПД;
А – площадь теплоотдающей поверхности корпуса, м2;
Кt = 12…17 Вт/(м2 0С) – коэффициент теплоотдачи корпуса;
tв – температура окружающей среды (обычно воздуха, tв = 200С);
[tM] = 75…900С – допускаемая температура нагрева масла.