

5.3.3. Шлицевые соединения: основные типы, понятие о расчете
Шлицевые соединения образуются выступами – зубьями на валу, входящими во впадины – пазы в ступице (рис. 5.11). Это как бы многошпоночное соединение. Соединения могут быть неподвижные и подвижные, допускающие перемещение детали вдоль вала.
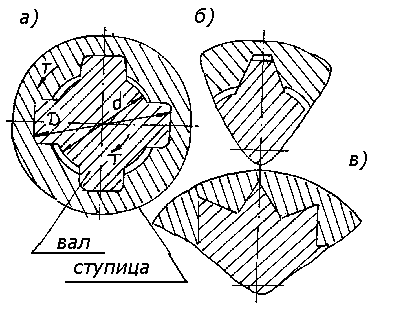
Рис. 5.11
В зависимости от формы профиля зубьев различают прямобочные, эвольвентные и треугольные соединения.
Прямобочные соединения (рис. 5.11,а) наиболее распространенные; их применяют с центрированием ступицы по наружному D и внутреннему d диаметрам и боковым граням шириной в.
Стандартом предусмотрены три серии соединений: легкая, средняя и тяжелая, отличающиеся высотой h и количеством z зубьев.
Соединения с эвольвентным профилем зубьев (рис. 5.11 б) более технологичные и прочные; центрирование по боковым поверхностям и реже – по наружному диаметру; число зубьев z = 4…20. Из-за сложности изготовления и более высокой стоимости применение эвольвентных соединений ограничено.
Соединения с треугольным профилем зубьев (рис. 5.11в) не стандартизованы и применяются, главным образом, в приборостроении и как неподвижные – в тонкостенных конструкциях.
Достоинства шлицевых соединений по сравнению со шпоночными: хорошее центрирование соединяемых деталей; высокая несущая способность; надежность при динамических и реверсивных нагрузках.
Недостатки: более сложная технология изготовления, а следовательно, и более высокая стоимость. Шлицевые соединения применяют в тяжелонагруженных и быстровращающихся валах. Шлицевые соединения (рис. 5.12) выбирают стандартными в зависимости от диаметра вала. Соединения выходят из строя из-за повреждения поверхностей зубьев в виде смятия и износа.

Рис. 5.12
Условие прочности на смятие
σсм = 2Т/(ψzhℓdср) ≤ [ σсм ], (5.25)
где ψ = 0,7…0,8 – коэффициент, учитывающий неравномерность распределения нагрузки между зубьями; z – число зубьев; h и ℓ - высота и длина поверхности контакта зубьев; dср – средний диаметр.
Для прямобочных зубьев: h = 0,5(D – d) – 2f; dср = 0,5(D+d).
Для эвольвентных зубьев: h = m; dср = mz.
Здесь f = 0,3…5 мм – размер фаски; m – модуль зубьев.
Допускаемое напряжение [ σсм ] выбирается по таблице или рассчитывается по формуле
[ σсм ] = σТ/S,
где S = 1,2…1,4 – коэффициент запаса прочности. При реверсивной нагрузке [ σсм ] уменьшается в 2 раза. При проектном расчете, используя формулу (4.3), зная [ σсм ], определяется потребная длина ступицы.
5.3.4. Понятие о штифтовых, профильных и соединяемых с натягом
Штифтовые соединения (рис. 5.13) осуществляются цилиндрическими, коническими и фасонными штифтами. Штифты применяют для точной фиксации деталей, а также для передачи небольших вращающих моментов, преимущественно в приборостроении. Штифты изготовляют, в основном, из углеродистых и легированных сталей типа 30, 45, 50, 65Г, 60С2А и др. Основные типы штифтов стандартизованы. При передаче вращающего момента Т штифты работают на срез.
Условие прочности соединения
τс = Ft/Ac = 8T/(πdd2ш ί) ≤ [τс], (5.26)
где d и dш – диаметры вала и штифта; ί – число поверхностей среза.
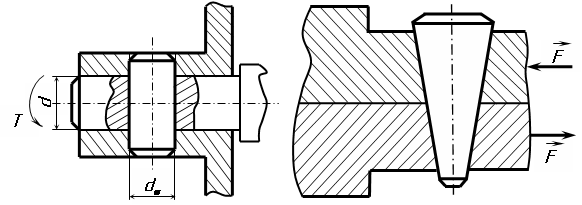
Рис. 5.13
При проектировочном расчете определяется диаметр штифта
dш
=
![]() .
(5.27)
.
(5.27)
Допускаемое напряжение на срез для штифтов из углеродистой стали [τс] = 75…80 МПа.
Профильными (рис. 5.14) называют соединения, в которых ступица насаживается на фасонную поверхность вала в виде квадрата. Треугольника, овала, окружности с лыской и т.п. Эти соединения имеют ограниченное применение, в основном для крепления рукояток маховиков и др. на концах валов. Профильные соединения рассчитывают на смятие.

Рис. 5.14
Соединения деталей машин с натягом (рис. 5.15) осуществляют за счет сил упругости от их предварительной деформации. Необходимый натяг создается за счет разности посадочных размеров, т.е. при посадке детали на вал с диаметром отверстия, меньшим диаметра вала. Соединения с натягом являются напряженными и передающими рабочие нагрузки за счет сил трения между сопряженными поверхностями.
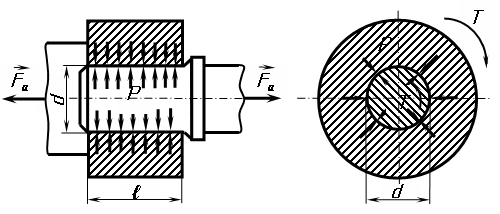
Рис. 5.15
Соединения могут быть по цилиндрическим или реже коническим поверхностям контакта. Соединение с натягом выполняют одним из трех способов: механическим (запрессовкой), нагревом охватывающей детали (ступицы), охлаждением охватываемой детали (вала).
Достоинства соединений с натягом: простота изготовления; хорошая центровка и фиксирование взаимного положения сопрягаемых деталей; возможность воспринимать значительные статические и динамические нагрузки.
Недостатки: сложность демонтажа и возможность повреждения поверхностей при этом; высокие сборочные напряжения и уменьшение прочности из-за рассеивания допусков.
Соединения с натягом применяются при больших динамических нагрузках и отсутствии необходимости в частой разборке и сборке (венцы зубчатых и червячных колес, соединения водила планетарной передачи с осями сателлитов и валом, диски турбин и др.).
Надежность и прочность соединения зависят от величины натяга:
N = (dв – d0) > 0,
где dв и d0 – диаметры вала и отверстия ступицы. При натяге удельное давление на поверхности контакта должно быть таким, чтобы сила трения оказалась больше внешних нагрузок.
Условия прочности (работоспособности) соединения:
а) при действии осевой силы
KFa
≤ fPπdℓ,
откуда Р ≥
![]() ,
(5.28)
,
(5.28)
где Р – давление на поверхности контакта; К – коэффициент запаса сцепления (К = 1,5…2,0); d, ℓ - диаметр и длина посадочной поверхности; f – коэффициент трения (f – коэффициент трения (f ≈ 0,08 – при запрессовке, f = 0,14 – при сборке с нагревом);
б) при действии вращающего Т момента
КТ
≤ f Pπd2ℓ/2,
откуда Р ≥
![]() ;
(5.29)
;
(5.29)
в) при совместном действии Fa и Т
К![]() ,
откуда Р
,
откуда Р
![]() , (5.30)
, (5.30)
где Ft = 2Т/d – окружная сила.
По величине необходимого давления Р по формулам теории упругости или таблицам выбирается величина натяга и соответствующая посадка.