

3.2.3. Геометрия и кинематика эвольвентных зубчатых передач и зацеплений
Геометрия передач
Геометрия зубчатого колеса (рис.3.6) характеризуют концентрическими окружностями по торцевому сечению с центром на оси колеса. Различают следующие окружности: основную, начальную, делительную, вершин и впадин зубьев.
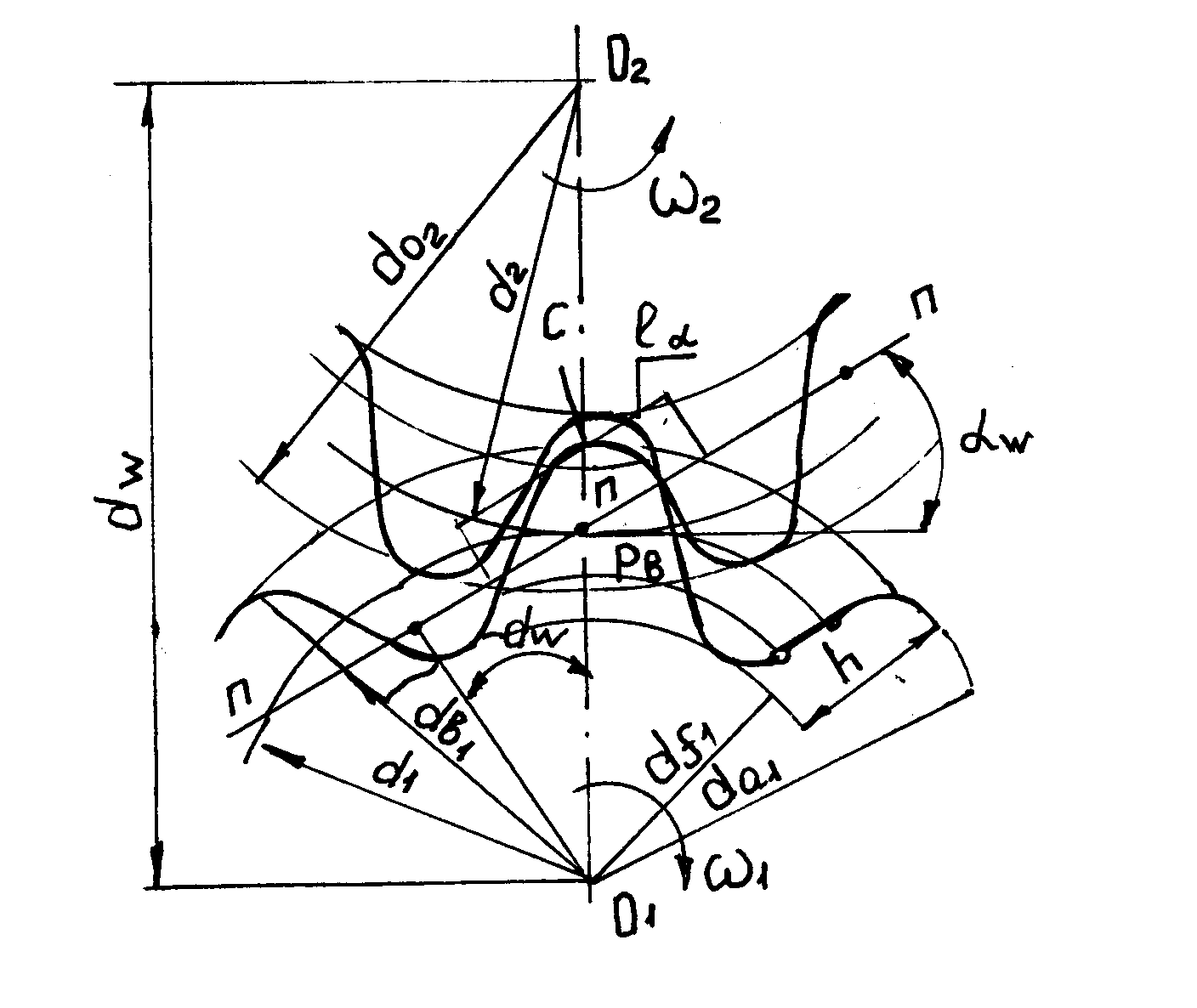
Рис.3.6
Начальными называют окружности, которые касаются друг друга в полюсе П зацепления и перекатываются одна по другой без скольжения.
Делительной называют окружность, по которой обкатывается инструмент при нарезании зубьев и производится деление цилиндрической заготовки на ρ равных частей, называемых шагом. Эта окружность делит зуб на головку и ножку и является базовой для определения размеров зубчатой передачи. Окружности, проходящие через вершины и впадины зубьев называют соответственно окружностями вершин и впадин.
Основными параметрами зубчатых колес и передачи являются (обозначения стандартные):
dв – диаметр основной окружности;
dw – диаметр начальной окружности;
d – диаметр делительной окружности;
dа – диаметр окружности вершин;
df - диаметр окружности впадин;
Рt = ρ – окружной шаг по делительной окружности (для сопряженной пары колес шаг одинаковый);
ρв – шаг по основной окружности;
h – высота зуба;
ha и hf – высота головки и ножки зуба;
s – толщина зуба;
е – ширина впадины;
с – радиальный зазор между вершиной зуба одного колеса и впадиной зуба другого;
в – ширина зубчатого венца;
аw – межосевое расстояние передачи.
Прямая линия N1N2 , переходящая через полюс зацепления П, касательно к основным окружностям колес, называется линией зацепления. Она является геометрическим местом точек контакта профилей зубьев при обкатке линией давления сопряженных профилей зубьев. Отрезок ℓα линии зацепления, отсекаемый окружностями вершин зубьев сопряженных колес, называется активной линией зацепления или длиной зацепления. Она определяет начало и конец зацепления пары сопряженных зубьев.
Угол αw образованный линией зацепления N1N2 и общей касательной, проведенной через полюс зацепления к начальным окружностям, называется углом зацепления. Он соответствует углу α профиля зуборезного инструмента, является стандартным и равным 200, т.е. αw = α = 200.
Отношение длины зацепления ℓα к окружному шагу ρв по основной окружности называется коэффициентом торцевого перекрытия εα:
εα = ℓα / Рв = ℓα/( Рt cosα). (3.17)
Для непрерывной нормальной работы зубчатой передачи необходимо, чтобы ℓα > Рв, т.е. εα > 1.
Основным расчетным параметром, по которому нарезаются зубья, является модуль m зацепления, представляющий отношение шага ρ к числу π, т.е.
m = Р /π. (2.8)
Для пары сопряженных колес модуль одинаковый. Значения модуля регламентированы ГОСТом.
При z < zmin , чтобы не было подрезания зубьев, инструмент (рейка) смещается, как правило, от центра заготовки, в результате чего получают положительное колесо (s >е) с более прочными зубьями. Колеса, изготовленные со смещением, называют корригированными.
Колеса (рис.3.7), зубья которых нарезаны без смещения инструментальной рейки (делительная прямая рейки касается делительной окружности колеса), dw = d, s = e, α = αw = 200, называются нормальными или нулевыми.
Для нормальных колес справедливы следующие соотношения:
d = mz ; ha = m ; hf = 1,25m ; h = ha + hf = 2,25m;
dα = d ±2ha = m(z±2); df = d ± 2hf = m (z ± 2,5);
ρ = πm ; s = ℓ = 0,5ρ; c = 0,25m;
dв = d cos α; εα = 1,2…1,8;
a = aw = 0,5 (d1 ± d2) = 0,5m (z1 ± z2).
Коэффициент высоты головки зуба h*a = ha/m = 1.
Коэффициент радиального зазора С* = С/m = 0,25.

Рис. 3.7
Минимальное число зубьев колеса без подрезания при нарезании рейкой zmin = 17.
В приведенных соотношениях верхний знак относится к внешнему зацеплению, нижний – к внутреннему.
Кинематика передачи
Основной кинематической характеристикой зубчатой передачи является передаточное отношение
ί12 = ω1/ω2 = n1/n2. (3.19)
Так
как в полюсе П зацепления окружности
![]() ,
то
,
то
ί12 = d2/d1. (3.20)
Учитывая, что d1 = m z1, а d2 = m z2, можно записать
│ί12│= z2/z1 = u. (3.21)
Отношение числа зубьев большого колеса к числу зубьев меньшего колеса (шестерни) называют передаточным числом и обозначают u. Передаточное число является частным случаем передаточного отношения ί.
Применение u вместо ί связано с формой расчетных зависимостей на прочность.
Передаточное отношение зубчатой пары находится в пределах от 10 до 0,1.
Передаточное отношение многоступенчатой передачи (ряда ступеней) определяется как произведение передаточных отношений ступеней. Например, для двухступенчатой передачи
ί = ί1ί2 = ω1/ω3 = n1/n3 = z2z4/(z1z3) = u. (3.22)
В точках контакта (кроме полюса) сопряжения зубьев имеет место перекатывание и скольжение со скоростью υs. Скольжение сопровождается трением, что является причиной потерь в зацеплении и изнашивания зубьев.