

Определение вероятностей отказа и обслуживания Основные формулы для смо Эрланга
Задаваемые параметры СМО:
n – количество каналов;
λ – интенсивность входящего потока;
μ – интенсивность обслуживания.
Вычисляемые параметры:
ρ – приведенная интенсивность, нагрузка СМО;
трафик:
ρ = λ/μ.
Формулы Эрланга определяют зависимости вероятностей состояний СМО, выраженные через количество каналов n и трафик ρ.
Вероятность того, что все каналы свободны
 . (11.2)
. (11.2)
Вероятность того, что заняты k каналов
 . (11.3)
. (11.3)
Вероятность того, что заняты все n каналов
 . (11.4)
. (11.4)
Вероятность отказа, т. е. вероятность того, что поступившая заявка найдет все каналы занятыми
Ротк = Рn . (11.5)
Вероятность обслуживания
Робс = 1 – Ротк . (11.5)
Пример расчетов по формулам Эрланга
Пусть многоканальная СМО с отказами имеет следующие параметры:
n = 3, λ = 20, μ=10
Требуется определить вероятности состояния системы. Система может находиться в четырех состояниях:
S0 - все каналы свободны;
S1 - занят один канал;
S2 - заняты два канала;
S3 - заняты три канала;
Граф состояний системы имеет вид, представленный на рис.11.2.

Рис. 11.2. Граф системы с четырьмя состояниями
Стрелки слева направо означают переход системы в более высокое состояние, которое вызывается воздействием входящего потока заявок, а справа налево – переход в более низкое состояние, которое вызывается воздействием потока обслуживания.
Вычисляем величину нагрузки системы
ρ = λ/μ = 20/10 = 2 эрл.
В соответствии с формулами Эрланга имеем следующие вероятности.
Вероятность того, что все каналы свободны
 .
.
Вероятность того, что заняты k каналов
![]() .
.
В соответствии с этой формулой вероятности того, что заняты один, два или три канала равны
![]() ;
;
![]() ;
;
![]() .
.
Поскольку система обязательно находится в одном из указанных состояний, должно выполняться условие
![]() .
.
Имеем,
![]() .
.
Вероятность того, что заняты все n каналов, определяется по формуле
![]() .
.
Вероятность отказа
Ротк = Рn = 0,211.
Вероятность обслуживания
Робс = 1 – Ротк = 1 – 0,211 = 0,789.
Построение графиков вероятности отказа и обслуживания на основе расчетных данных
Анализируются характер зависимостей Ротк(n) и Ротк(ρ), а также Робс(n) и Робс(ρ).
Опорная точка (точка 1):
n =3, ρ =2.
Имеем:
Р0 = 0,158 Р1 = 0,316 Р2 = 0,316
Р3 = 0,211 Ротк = 0,211 Робс = 0,789
Расчеты при изменении числа каналов (точка 2):
n =4, ρ=2
Пример расчета:
 ;
;
![]() .
.
Имеем для точки 2 следующие результаты:
Р0 = 0,143 Р1 = 0,286 Р2 = 0,286
Р3 = 0,191 Р4 = 0,095 Ротк = 0,095 Робс = 0,905
Сопоставление результатов расчетов Ротк и Робс в точках 1 и 2 показывает, что с увеличением числа каналов с n=3 до n=4 вероятность отказа уменьшается с 0,211 до 0,095, а вероятность обслуживания увеличивается с 0,789 до 0,905.
Результаты расчетов при ρ = const и изменении n от 1 до 4 представлены в табл.11.1.
Таблица 11.1.
|
ρ |
n |
P0 |
P1 |
P2 |
P3 |
P4 |
Pотк |
Робс |
|
2 |
1 |
0.333 |
0.666 |
|
|
|
0,666 |
0,333 |
|
2 |
2 |
0.200 |
0.400 |
0.400 |
|
|
0,400 |
0,600 |
|
2 |
3 |
0.158 |
0.316 |
0.316 |
0.211 |
|
0,211 |
0,789 |
|
2 |
4 |
0.143 |
0.286 |
0.191 |
0.191 |
0.095 |
0,095 |
0,905 |
Характер графиков Ротк и Робс = 1 – Ротк показан на рис.11.3.

Рис. 11.3. Зависимость вероятностей отказа и обслуживания при изменении количества каналов с n = 1 до n = 5
Расчеты Ротк и Робс при изменении приведенной интенсивности.
Пример расчета для точки 3 с n = 3 и ρ = 4:
 ;
;
![]() .
.
Имеем для точки 3 следующие результаты:
Р0 = 0,042 Р1 = 0,168 Р2 = 0,336
Р3 = 0,451 Ротк = 0,451 Робс = 0,549.
Сопоставление результатов расчетов Ротк и Робс для точек 1 и 3 показывает, что с увеличением нагрузки системы с ρ = 2 до ρ = 4 вероятность отказа увеличивается, с 0,211 до 0,451, а вероятность обслуживания уменьшается с 0,789 до 0,549.
Результаты расчетов при n = const и изменении ρ от 1 до 4 представлены в табл.11.2.
Таблица 11.2.
|
ρ |
n |
P0 |
P1 |
P2 |
P3 |
Pотк |
Робс |
|
1 |
3 |
0,375 |
0,375 |
0,188 |
0,063 |
0,063 |
0,937 |
|
2 |
3 |
0,159 |
0,318 |
0,318 |
0,212 |
0,212 |
0,788 |
|
3 |
3 |
0,077 |
0,213 |
0,347 |
0,347 |
0,347 |
0,653 |
|
4 |
3 |
0,042 |
0,168 |
0,336 |
0,451 |
0,451 |
0,549 |
Характер графиков Ротк и Робс = 1 – Ротк показан на рис.11.4.
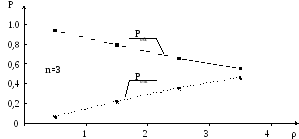
Рис. 11.4. Зависимость вероятностей отказа и обслуживания при изменении нагрузки на систему с ρ = 1 до ρ = 4