

5.11. Роликовые конвейеры
Роликовые конвейеры предназначены для транспортирования штучных грузов. Эти конвейеры могут составлять сложные транспортные системы, многочисленные разветвления трасс, их часто применяют в виде составных частей в погрузочных и перегрузочных устройствах, в технологических линиях, в пакетоформирующих машинах и т. п.
5.11.1. Типы и область применения
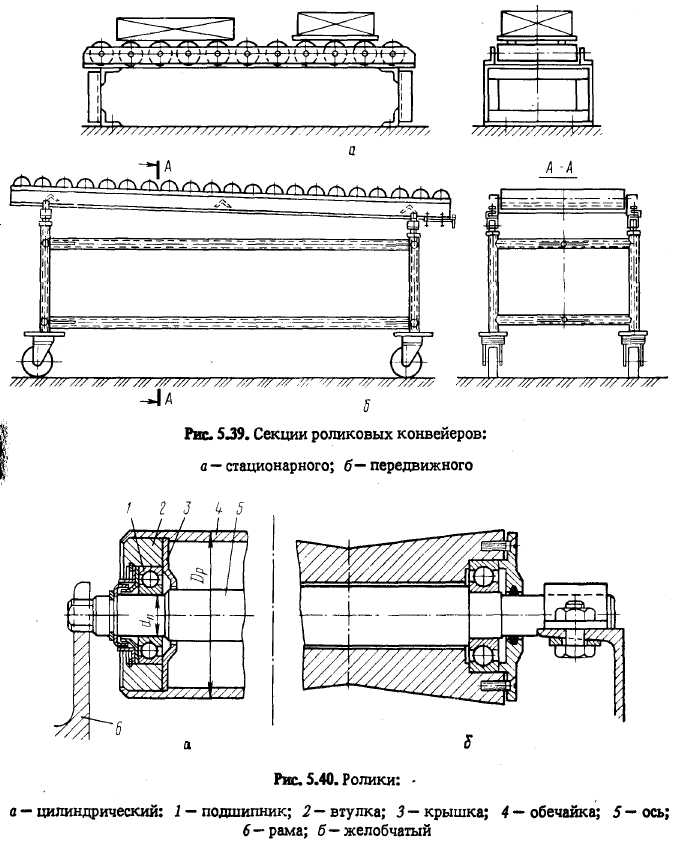
Роликовые конвейеры могут быть приводными и неприводными. Неприводные роликовые конвейеры выполняют стационарными (рис. 5.39, а), передвижными (рис. 5.39, б) и переносными.
Основные элементы неприводного конвейера - цилиндрические ролики (рис. 5.40, а) из стальных бесшовных труб по ГОСТ 8324. При нетяжелых условиях работы применяют ролики с пластмассовыми обечайками и вкладышами.
Длину цилиндрических роликов Вр и шаг их расстановки /р выбирают из рядов чисел:
![]()
Для круглых (в сечении) грузов можно использовать желобчатые ролики литые (рис. 5.40, б).
Для транспортирования нетяжелых грузов с жестким основанием применяют дисковые ролики; диски выполняют из стали, алюминия, пластмассы и чугуна.
При транспортировании грузов одного типоразмера с постоянной ориентацией на настиле можно применять усиленные дисковые ролики с ребордами, предохраняющими грузы от падения с настила. Конвейеры с такими роликами отличаются малой металлоемкостью.
Различают роликовые конвейеры с групповым и индивидуальным приводом. Наиболее часто ролики приводятся во вращение общим трансмиссионным валом с коническими зубчатыми колесами.
В ряде отраслей промышленности получили распространение роликоцепные конвейеры, у которых роликовая дорожка в передней части имеет разрез и перемещение груза осуществляется движущейся под роликами тяговой цепью с захватом.
5.11.2. Расчет конвейеров
Расчет неприводных роликовых конвейеров сводится к определению угла наклона к горизонту и скорости груза.
Угол наклона конвейера, при котором будет обеспечиваться спуск груза под действием составляющей собственной массы, определится из условия
![]()
где G — сила тяжести груза, Н; к — угол наклона конвейера, град; W — суммарное сопротивление перемещению груза, Н:
![]()
(5.95)
где W1 — сопротивление качению груза по роликам, Н; W2 — сопротивление вследствие трения в цапфах роликов, Н; W3 — сопротивление вследствие скольжения груза по роликам и сообщения им кинетической энергии, Н; к — коэффициент трения качения груза по роликам; к = 0,2; Dр — диаметр ролика, мм; Gр — сила тяжести ролика, Н; i — число роликов, на которых находится груз; м — коэффициент трения в цапфе ролика; для подшипников каченияц μ= 0,03...0,06; dц — диаметр цапфы (шейки) ролика, мм; кТ — коэффициент, учитывающий, что не вся масса вращающейся части ролика расположена на его окружности; kT = 0,8...0,9; L — длина пути перемещения груза, м.
Решая уравнение (5.95), найдем коэффициент сопротивления движению груза w и равный ему тангенс минимального угла а наклона гравитационного конвейера, на котором груз движется с постоянной скоростью v:
![]()
Минимальную скорость груза на роликовом конвейере принимают 0,35 м/с, наибольшую - 2,0 м/с.
Если интервал времени между грузами, поступающими на ролик, меньше периода вращения ролика под грузом, то ролик не останавливается и сила сопротивления W3 = 0; тогда необходимый угол наклона конвейера
![]()
На практике величину углов наклона роликового конвейера принимают: при перемещении ящиков 2...4°, мешков - 4...6°.
Для определения скорости груза при движении по гравитационному роликовому конвейеру, используя уравнение живых сил, получим
![]()
где wn — коэффициент трения в подшипнике;
![]()
В приводных роликовых конвейерах ролики приводятся во вращение обычно от группового привода. Мощность привода роликового конвейера (кВт)
![]()
где Q
— производительность
конвейера, т/ч; Q = 3,6 G/tгр
v; Lг—длина
горизонтальной проекции конвейера, м;
wх.к— коэффициент
сопротивления передвижению грузов,
лежащих на конвейере: wx.к
= (м dц + 2 к)
/Dр ; wр
- коэффициент сопротивления
вращению роликов;
![]() ;
in
-число приводных роликов
;
in
-число приводных роликов