

5.3.3. Натяжные устройства
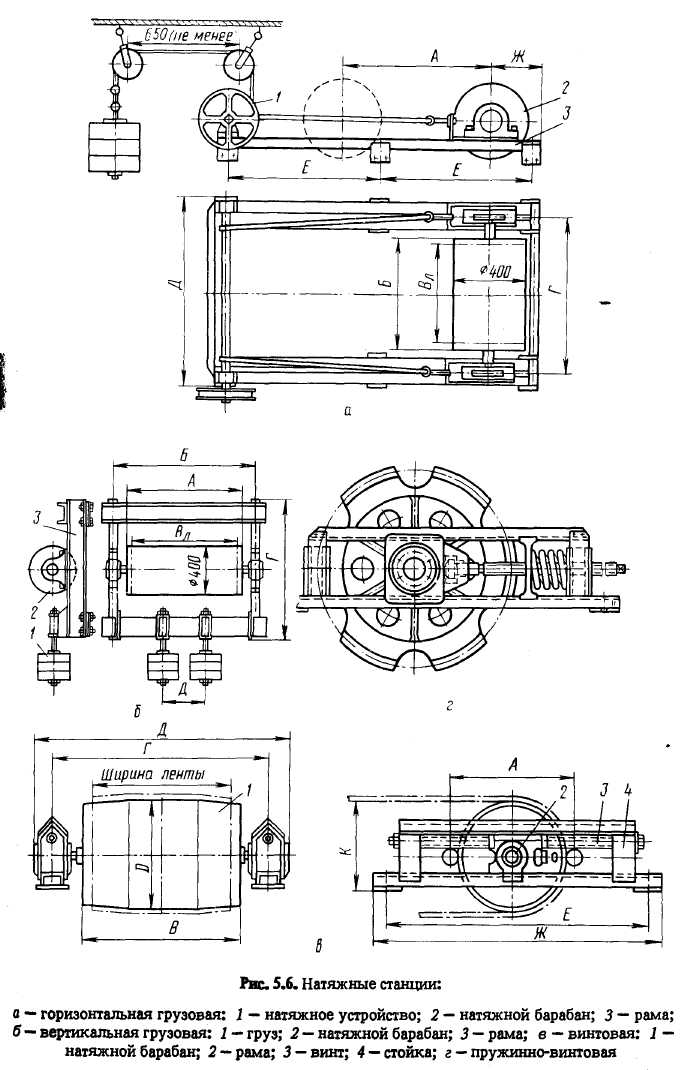
Натяжные устройства предназначены для создания необходимого натяжения ленты, обеспечивающего сцепление ее с приводным барабаном без проскальзывания, а также для ограничения провисания ленты между опорами и компенсации удлинения ленты в результате вытяжки ее в процессе работы. В машинах непрерывного действия с тяговым элементом применяют натяжные станции двух типов: грузовые и винтовые (рис. 5.6).
Грузовые станции автоматически поддерживают постоянное натяжение ленты. В зависимости от направления перемещения натяж-
ного барабана различают горизонтальные и вертикальные грузовые станции.
Натяжное усилие Fнт (H) равно сумме натяжений набегающей Fнб на поворотное устройство и сбегающей Fc6 с него ветвей тягового элемента и усилия W перемещения ползунов или натяжной тележки:
![]()
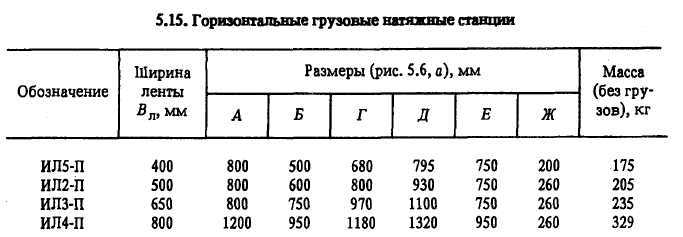
Горизонтальную натяжную станцию располагают в начале грузовой ветви конвейера (табл. 5.15).
Вертикальную грузовую натяжную станцию (рис. 5.6, б, табл. 5.16) монтируют в начале холостой ветви, используя отклоняющие барабаны. Для перемещения рамы станции устанавливают две вертикальные направляющие из швеллеров.
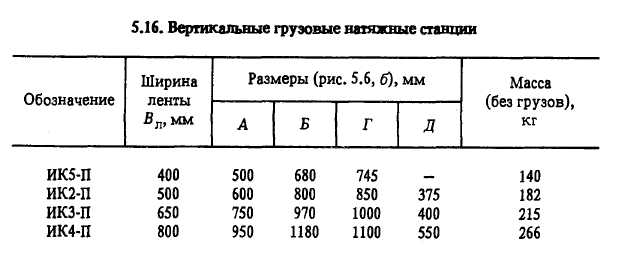
Натяжение ленты обеспечивается под действием массы барабана, рамы и подвешенных к ней грузов. Ход станции принимают 1,0... 1,5 % от длины конвейера.
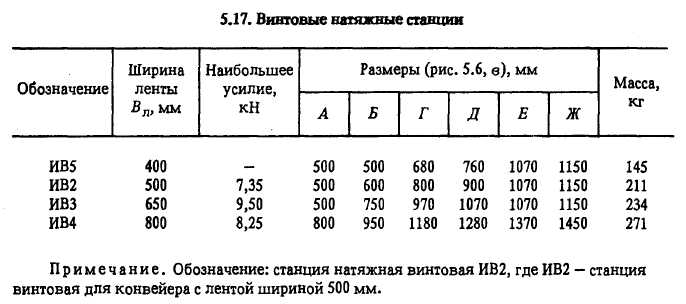
Винтовые натяжные станции используют обычно в конвейерах длиной не более 50 м (рис. 5.6, в, табл. 5.17). Винты, действуя на подшипники оси, перемещают барабан в направляющих рамы и обеспечивают необходимое натяжение ленты. Винтовую станцию монтируют в начале грузовой ветви конвейера.
В качестве натяжных барабанов для станций всех типов используют неприводные барабаны.
На тяжелых и длинных цепных конвейерах целесообразно устанавливать пружинно-винтовые натяжные устройства (рис. 5.6, г).
5.3.4. Приводы
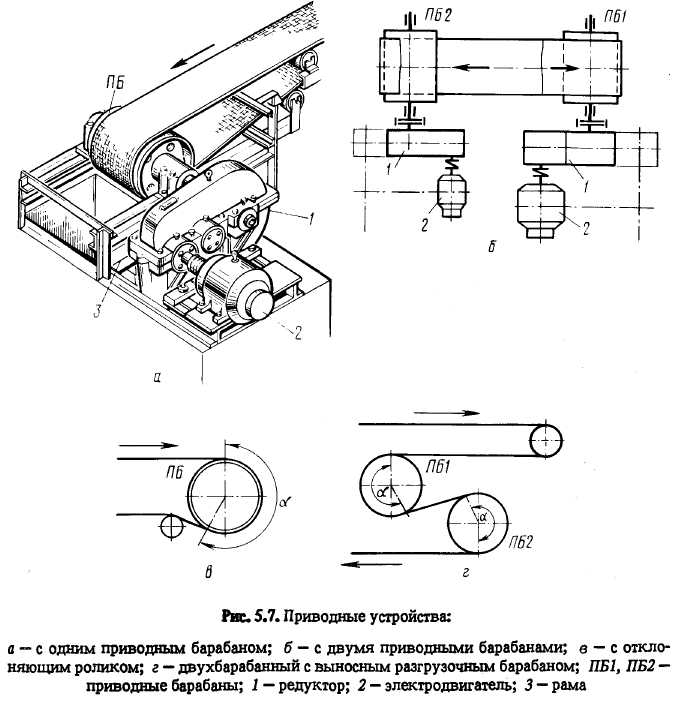
Приводной механизм (привод) служит для обеспечения движения тягового и грузонесущего элементов конвейера с грузом. Основными узлами приводов конвейеров являются двигатели, промежуточная механическая передача, приводные элементы (барабаны, звездочки, блоки), тормоза (или остановы), ограничители крутящего момента и муфты. Многообразие типов конвейеров обусловливает и многие конструктивные разновидности приводов (рис. 5.7).
По способу передачи тягового усилия различают приводы с передачей усилия зацеплением и фрикционные.
Фрикционные приводы применяют для лент, канатов и кругло-звенных цепей. Они могут быть однобарабанные (одноблочные), двух-и трехбарабанные. Последние применяют только в конвейерах большой протяженности (L = 300 м и более).
В конвейерах применяют электрический и значительно реже электрогидравлический и пневматический приводы. В электроприводах используют асинхронные электродвигатели трехфазного тока с короткозамкнутым или фазовым ротором общепромышленного исполнения; для конвейеров тяжелого типа, а также при пульсирующем движении - двигатели с повышенным пусковым моментом.
В качестве промежуточной механической передачи используют, как правило, редукторы или комбинированные передачи - редукторы с дополнительными открытыми клиноременной, зубчатой или цепной передачами.
В ряде случаев однобарабанный привод небольшой мощности (до 30...50 кВт) выполняют с встроенным внутрь барабана электродвигателем и редуктором. Такие мотор - барабаны особенно целесообразно
использовать для привода передвижных конвейеров и для питателей: они компактны, имеют небольшие габаритные размеры и малую массу.
Перспективным для высокоскоростных ленточных и пластинчатых конвейеров большой производительности является применение в конвейерах линейных асинхронных двигателей (ЛАД) поступательного движения. Такие двигатели дают возможность передавать тяговые усилия грузонесущему элементу конвейера без промежуточных редукторных механизмов и осуществить более компактную конструкцию привода.
Место расположения привода определяется конструктивными и эксплуатационными условиями (удобство сооружения фундамента для привода, удобство обслуживания и т. п.). Привод рекомендуется устанавливать сразу после прямолинейного участка с наибольшим сопротивлением; как правило, это или в верхней точке участка подъема груза, или около места разгрузки.